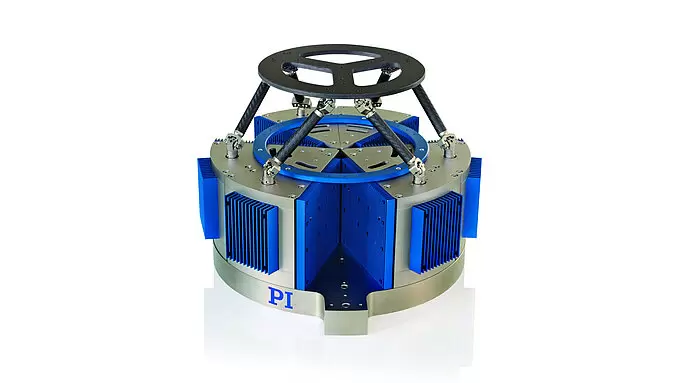
六自由度并联运动设计使其比串联运动系统更加紧凑、更具刚性,动态范围更大,无移动电缆:更稳定、摩擦更小
电机轴上的旋转编码器
工业和科研. 用于生命科学、生物技术、自动化、微加工
主动轴
X,Y,Z,θX,θY,θZ
X、Y向上的行程*
±50
毫米
Z向上的行程*
±25
θX、θY向上的行程*
±15
°
θZ向上的行程*
±30
促动器驱动
力矩电机,无刷(BLDC)
促动器设计分辨率
0.2
微米
典型值
X、Y和Z向上的最小位移
5
θX、θY、θZ向上的最小位移
12.5
微弧度
X、Y向上的重复精度
±1.5
Z向上的重复精度
±0.5
θX、θY向上的重复精度
±8
θZ向上的重复精度
X、Y向上的空回
30
Z向上的空回
3
θX、θY向上的空回
θZ向上的空回
300
X、Y和Z向上的最大速度
20
毫米/秒
θX、θY、θZ向上的最大速度
200
毫弧度/秒
负载能力(底板为水平方向)
千克
最大
负载能力(底板为任意方向)
10
保持力(底板为水平方向)
牛
保持力(底板为任意方向)
100
工作温度范围
0 到 +50
°C
材料
铝
质量
15
±5 %
电缆长度
米
±10 毫米
推荐控制器
C-887.5x
六足位移台系统:带C-887.5xx控制器的H-xxx六足位移台
H-820六足位移台微型机器人
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。所有线上有货的产品均可直接订购。
通过电子邮件或电话从当地PI销售工程师处快速获取解答。
运动模拟器具对运动动力学具有较高的要求(振动器)。
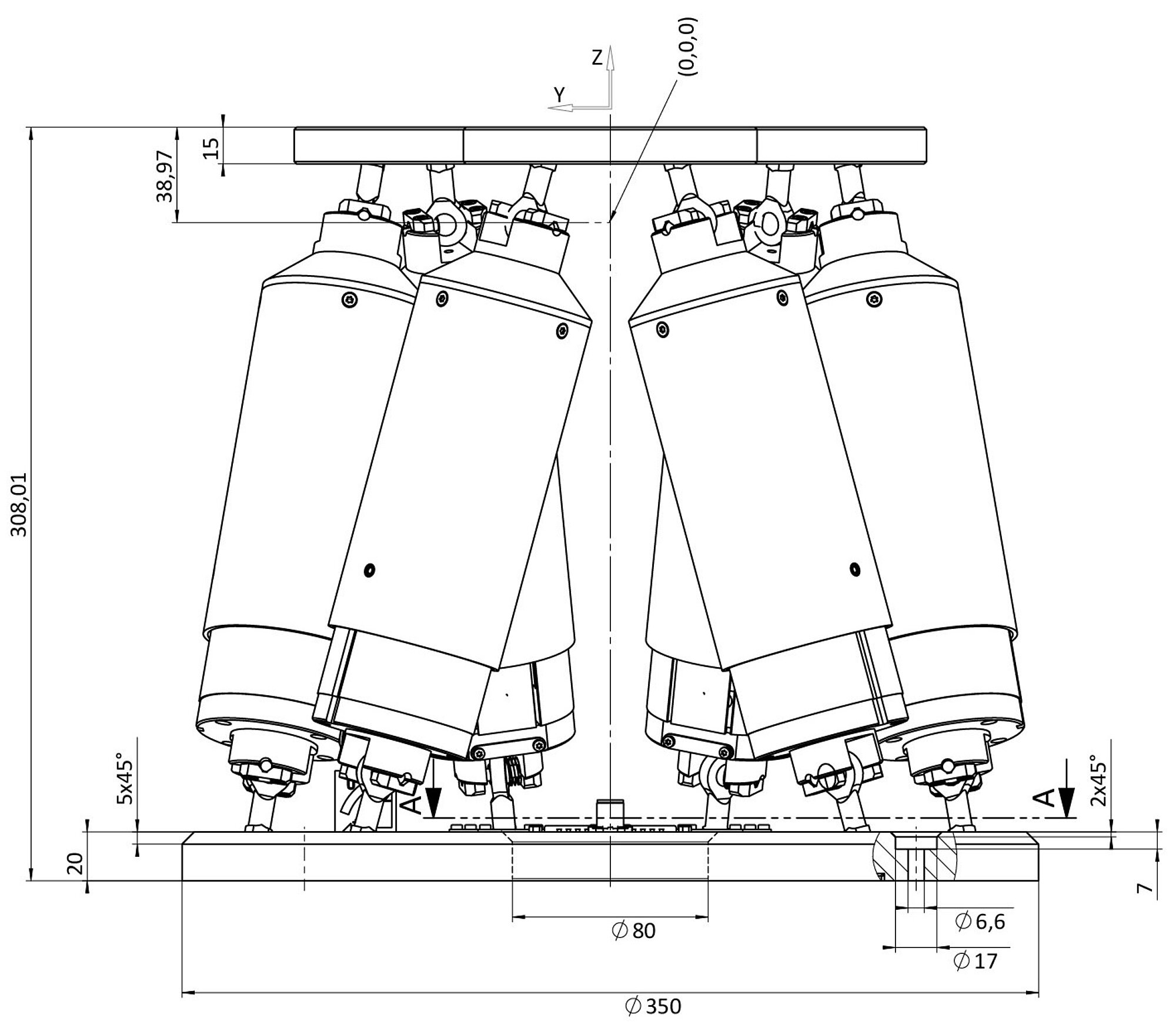
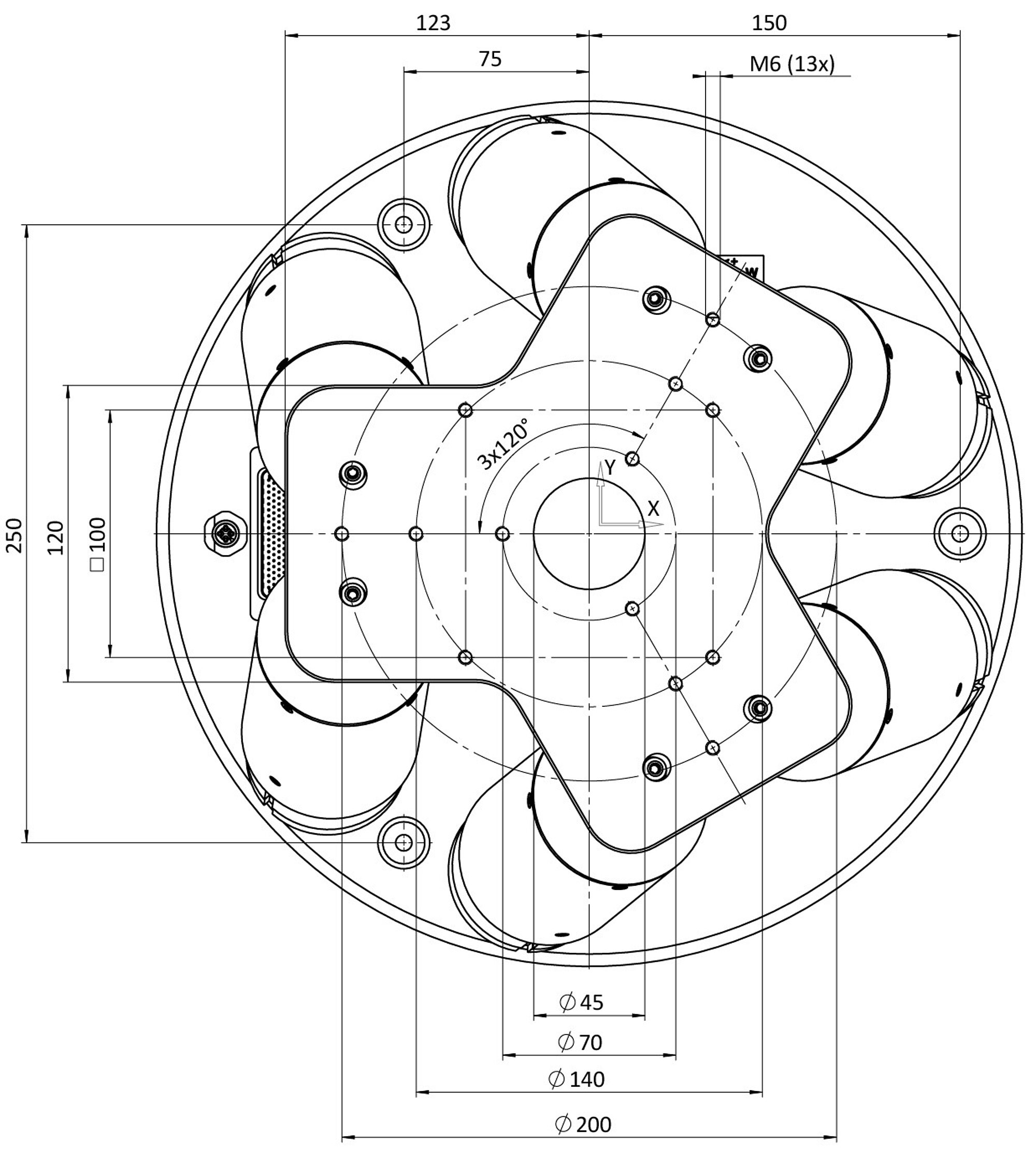
六足位移台平台适用于在所有六个自由度(即三根线性轴和三根旋转轴)实现负载的准确定位和校准。
六足位移台的采用最大限度减少了运动机器人占用的空间,为线上自动化系统的样本检测工作赋予了卓越的灵活性。