PIVirtualMove
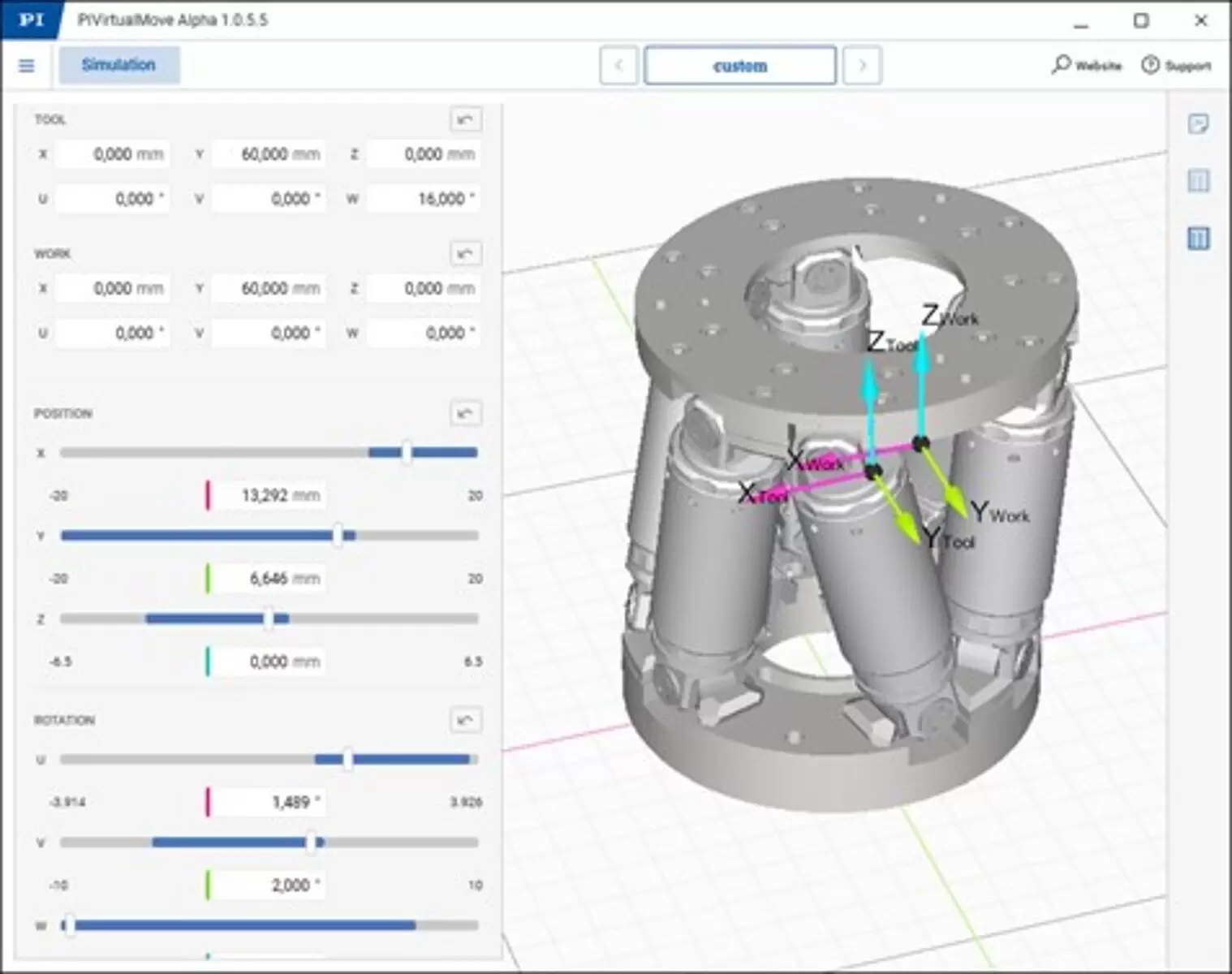
PIVirtualMove是一款用于六足位移台和六自由度Nanocube的运动验证和工作区计算的新程序。
对于这种复杂的多轴机械部件,并非每根轴范围内的每一个点都可以达到。容许的并联运动工作区的极限随当前位置、安装位置以及作用在运动平台上的力和力矩而变化。因此,在选择系统时,必须确保各点的可达性。在此,PIVirtualMove支持以下功能:
- 根据安装位置和负载(力和位置工作区)验证位置的可达性
- 自由定义坐标系、枢轴点、安装位置和负载
- 从与数据表相链接的数据库中选择机械部件
- 无需与控制器或定位器连接即可操作该软件
PIVirtualMove是PIHexapodSimulationTool的后续产品。
PIVeriMove
受限空间可能会给运动和定位系统及运动平台上的装置以及周围设备带来问题。即使在设计实验或生产装置时费尽心机,碰撞的风险也无法完全避免。使用离线碰撞检测功能,PIVeriMove软件会计算运动范围受阻时六足位移台的允许行程。这可能是由采样装置或真空室的壁引起的。
可以将在软件中创建的配置传输到六足位移台,以用作几何计算的基础。在操作期间,在发出每个运动或位置指令之前,均应检查与物体的安全间隙。如果碰撞即将发生,运动就不会执行。为了提高安全性,可以指定一个最小间隙,无论空间方向如何,均将该间隙加到距离上。枢轴点是平台旋转的参考点,可以随时改变。
- 计算六足位移台的允许行程并进行离线碰撞分析
- 要定义场景,请导入安装在移动平台上或安装在六足位移台附近的三维物体
- 计算物体之间的最短距离
- 将工作区极限传输到控制器
- 可以改变枢轴点而无需重新配置障碍物场景
- 为了使用碰撞检测功能,需要额外的许可证。此功能仅适用于C-887
模拟器
在现场无系统可用的情况下,尽早实施客户软件通常是明智之举。PI提供合适的软件,可用于模拟完整的六足位移台系统(六足位移台机械部件和控制器)或作为主机PC上虚拟机的最新控制器平台。有了它,客户就可在系统交付之前开发、测试和优化用户程序。
PIControllerEmulatorGCS3.0
- 仿真与GCS3.0输入相关的控制器行为
- 无需硬件即可测试代码
- 简化自动化
- 实现了前端加载和虚拟调试:甚至在交付控制器和定位器之前就已做好集成准备
- 通过TCP/IP与仿真控制器进行通信,这意味着可以使用PIMikroMove或已知的API
PIHexapodEmulator
- 可以仿真C-887六足位移台控制器、连接的六足位移台和两根附加轴的程序
- 适合希望在GCS指令输入上测试六足位移台系统行为的用户,即使尚未提供实际的六足位移台控制器
- 模拟六足位移台系统可以使用PIMikroMove或通过任何TCP/IP连接进行操作