EtherCAT是一种基于以太网的开放式现场总线系统,最初是由倍福自动化公司开发的。现如今,作为一款用于机器控制解决方案的稳健型高速实时网络,EtherCAT越来越受到控制和系统工程师的欢迎。 现场总线系统的灵活性是一大原因。请单击此处,以了解有关ACS运动控制解决方案如何得益于EtherCAT集成的内容。
EtherCAT的技术背景
实时网络具有以下特性:
- 非常准确的定时
- 高可靠性
- 确定性的 – 有保障的响应时间
EtherCAT网络包括一个EtherCAT主站和一个或多个EtherCAT节点。一个网络最多可包含65,535个节点。
其良好的性能、灵活的拓扑结构、简单的集成和稳健性使得越来越多的公司决定开发基于EtherCAT的产品。自EtherCAT于2003年4月推出以来,全球已有超过4500家公司开发了基于EtherCAT的产品和相关软件。
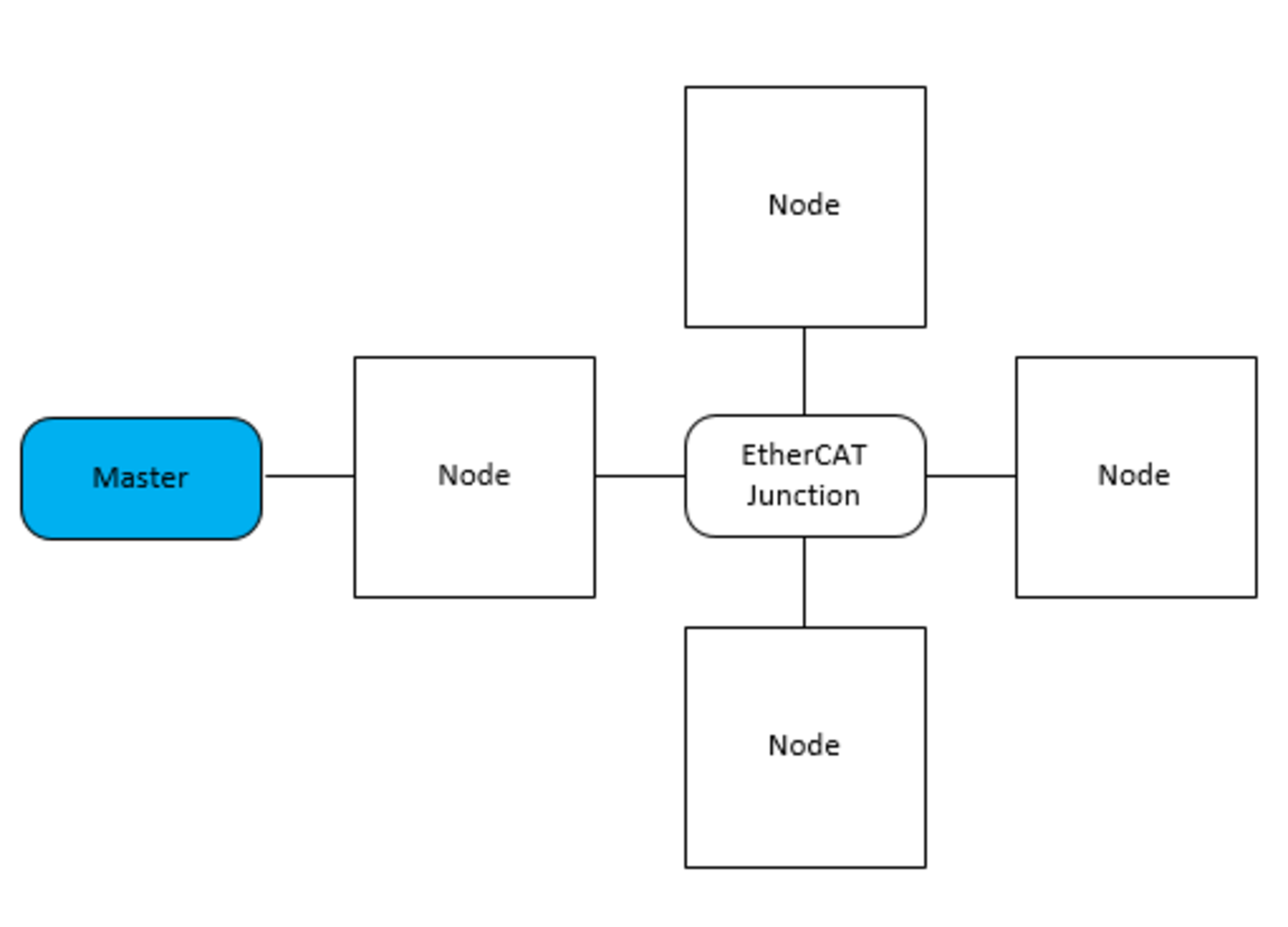
ACS支持哪些网络拓扑结构?
支持线型、环型和星型拓扑结构。环型拓扑结构NetworkBoost™是一种通过网络故障检测和恢复来提高系统正常运行时间和生产效率的特性(NetworkBoost应用说明)。基于EtherCAT连接的星型拓扑结构在使用灵活配置特性时可能是有益的,该特性可在机器运行期间断开节点组(应用说明)。
同步:可以实现何等循环时间?
在高性能应用中,准确同步是一个关键因素。ACS节点使用EtherCAT分布式时钟(DC)机制进行同步。控制器支持短循环时间:1毫秒、0.5毫秒、0.25毫秒和0.2毫秒(1、2、4和5千赫兹)。
非ACS产品的集成变得不再繁琐
非ACS DS402驱动器和其他类型的EtherCAT节点通常可以与ACS控制器配合使用。在同一EtherCAT网络中与其他ACS产品的集成很简单,且无需作出任何特殊调整。
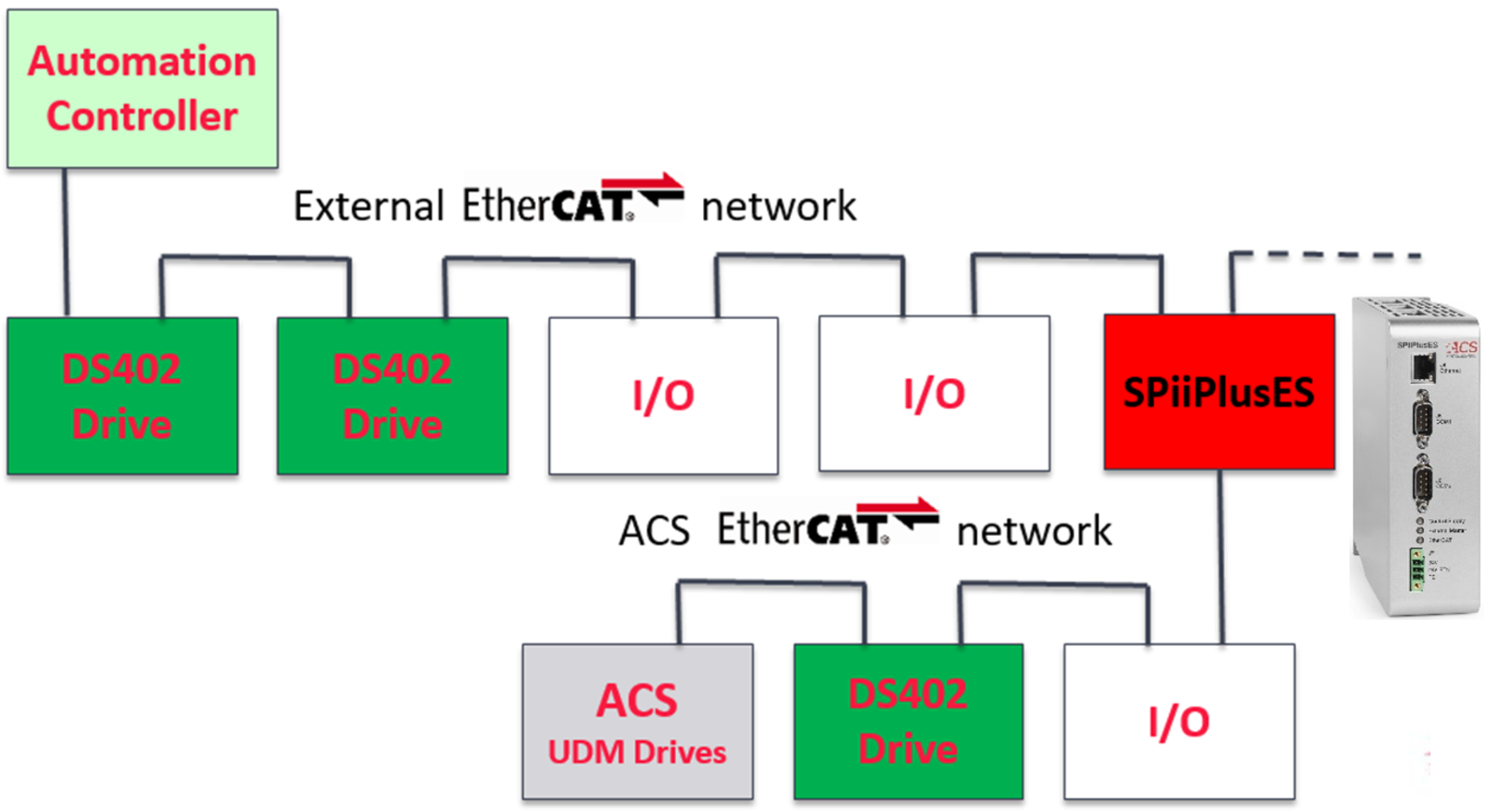
ACS是否可以作为由非ACS EtherCAT主站控制的运动子系统加以集成?
SPiiPlusES是一款新推出的产品,可以由非ACS EtherCAT主站控制,并且可以方便地集成到非ACS EtherCAT网络中。SPiiPlusES首先是一种控制ACS“内部”网络的运动控制器。作为EtherCAT驱动器,根据DS402标准,它支持多达8根轴。此外,它还可以作为EtherCAT桥使用,以提供非ACS与ACS网络之间同步数据交换的功能。
这使得能够从现有网络的独特ACS控制算法中受益:例如,ServoBoost可用于优化步进和稳定时间,而NanoPWM允许以亚纳米精度进行跟踪。
ACS运动控制和EtherCAT
ACS Motion Control是一家跨国公司,为分布式架构的以运动为中心的应用提供基于EtherCAT的高性能机器控制系统。
ACS开发EtherCAT控制器和不同的EtherCAT节点,如驱动器、数字I/O、模拟I/O、DS402驱动器等。此外,ACS还开发了完备的辅助软件工具,如EtherCAT配置器和网络诊断。
ACS与PI一道为组装、半导体制造、机械工程、激光材料加工、检验系统或增材制造等工业自动化提供以运动为中心的解决方案。
了解更多
PI精密运动解决方案的EtherCAT连接

除ACS网络外,PI还使用EtherCAT将其6轴并联运动六足位移台连接到自动化任务。这减少了客户方的集成工作量。位置只是直角坐标中的指令位置,并且可以在空间中自由定义稳定、虚拟的枢轴点。无论是使用工具坐标系还是工作坐标系,PI EtherCAT六足位移台控制器都可以处理所有必需的转换。了解更多
