
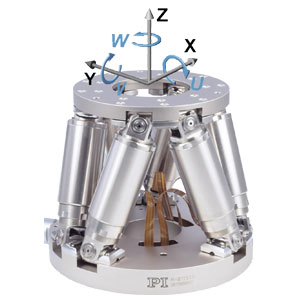
多镜头对准时,六自由度的主动对准能调准到最好的位置从而获得高质量图像。六足位移台微运动机器人采用新型的运动技术、可在异常坚硬、紧凑和高精度的结构中提供所有六个自由度、由采用优化约束方式排列的六根机动支撑腿并联支撑的单个移动平台组成(“并联运动”)。从运动控制的角度来看、六足位移台相当于顶部装有转台和双轴测角仪的XYZ轴堆叠。这一假设实际上过于简化了、因为双三脚架型式与PI的新型数字控制器技术相结合、六足位移台可以随时自由平移和旋转系统的坐标系。这允许将旋转中心点置于空间中的任意位置、例如光学焦点、光纤或波导端面以及任何其他方便的位置。这反过来又允许在角度促动期间尽量降低或完全消除几何误差和交叉耦合。其他优点包括比其他高质量平台堆叠高出一个数量级的刚度、跨轴的相同动力学、消除移动/扫描电缆以及由其引起的偏转、磨损和不可靠性。
但显著的区别与功能有关。这些功能不仅对于相机和光学器件制造具有重要意义、而且是下一代制造工艺的实际推动者。例如、PI的控制器包含一个内置的位置波形发生器、一个高速数据记录器以及一系列新型自动对准和扫描算法、包括能够同步优化多个自由度的并行梯度搜索。可选的力传感器可用于测量和产生具有毫克级灵敏度的校准力。PI独特的H-811六足位移台精密6轴运动系统可提供高达34毫米/42度的行程以及亚亚微米的闭环精度和20毫米/秒的速度。PI坚持使用高质量、高刚性的偏置万向节、这意味着这些六足位移台可沿任意方向安装、从而实现几乎无空回的操作。其先进的无刷直流电机具有较长的使用寿命和较宽的工作动态范围-完全整合在一个大小相当于2磅咖啡罐的包装中。

实现示例 |
MTF优化
. 结合可采用多种方式从外部实现的快速成像和调制传递函数转换、多个六足位移台微型机器人可以同步优化光具组元件的MTF。该方法依赖于在承载透镜组件中的每个元件的六足位移台上定义和运行多个优化流程的能力。这可以大幅提高精密光学成像器件的最终组装和鉴定的工艺吞吐量。甚至可以在胶粘剂固化过程中进行优化以改正固化应力并改善器件质量。
吞吐量优化
结合快速外部光功率计量、六足位移台微型机器人可以借助于光学系统、激光腔和光子组件跨多个自由度和多条通道一步到位地优化光通量。与迄今为止需要在所涉自由度上进行重复的、循环的位置调整序列的传统技术相比、新型技术可以将改进后的吞吐量提高两个数量级以上。这几乎可以省去占用大量制造工艺周期时间的对准过程。
通常情况下、关键流程和质量度量包括将测定量的位置依赖性映射为一根或两根轴上的位置函数。PI的六足位移台微型机器人采用独特的无振动单频平面扫描算法、与控制器的内置数据记录器相结合、可以实时同步采集外部计量和六轴位置。即使采用粗略的快速扫描方法、内部映射也可以准确确定计算出的最大值和形心位置。随后可以从控制器中提取数据,以便通过快速接口(TCP/IP或RS-232)绘制图形或执行进一步分析。
光学图像稳定性测试和校准
PI的六足位移台微型机器人采用内置的可用于仿真生理性震颤和车辆运动等干扰的多轴任意位置波形发生器</a>。事实证明、这一能力对光学图像稳定技术和机制的开发、评估和生产测试极富价值。数据采集可以与位置波形生成并行执行。

