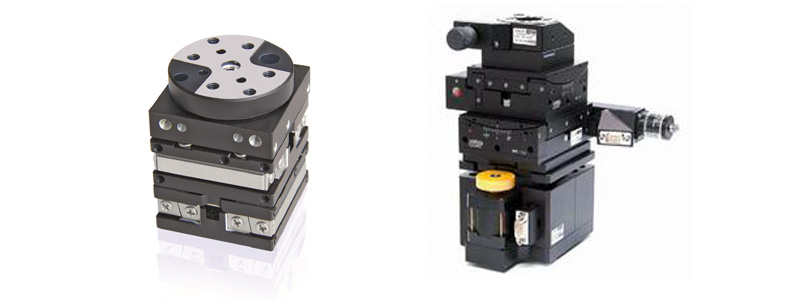
当面临需要多轴定位系统的运动控制应用时,用户通常只是简单地堆叠各个电动平台,事实上,对于仅需少数几个轴的总成来说,这是一种不错的方法。 但随着应用变得愈发复杂,相应的平台堆叠结构也是如此,包括线缆管理、支架布置等,非常现实和实际的考量因素便开始显现。 当遇到需要包含4、5和6轴电动平台的高性能多轴定位系统的情况时,应质疑堆叠单个单轴平台的传统方法,并将其与基于并联运动的固有六轴平台设计进行仔细比较。

- 刚度。 一些平台制造商以单位力下的轴向偏差来发布刚度规格,但这对于估算平台或堆叠结构的动态性能几乎没有用处。 一个更相关的指标是谐振频率,因为它综合了机构的有效刚度系数及其结构的累加质量。 (因此,知道了Fres,您就可以轻松估算出经过良好调谐的闭环平台可能需要的步进/稳定时间:大约为[3 Fres]-1)。 根据我们的经验,大多数高质量的传统线性平台在空载状态下的谐振频率约为75-120Hz。 将它们堆叠起来,由此形成的结构可能会表现出响应能力显著受限以及稳定时间变长。
- 动态性能不一致。 串联运动多轴平台堆叠结构中的底部平台承载着整个堆叠结构的质量,依此类推,直到顶部平台,该顶部平台仅承载应用负载。 因此,调谐是一个费力的逐轴操作过程,每个轴都有不同的设置… 从而导致响应能力各异。
- 旋转中心点位置不灵活。 堆叠式多轴定位平台将其俯仰/偏转和旋转运动的中心置于每个旋转平台和测角仪轴承的几何中心。 虽然有时可以通过定制转接板和夹具将这些中心排布成在空间中的期望点(例如透镜的焦点)重合,但这需要耗费时间和精力,而且一旦应用需求发生变化,这种方式就表现出灵活性上的缺乏。 此外,重大变更可能会改变堆叠结构的动态特性,从而必须再次对每个轴进行重新调谐。
- 布线。 电缆是运动控制中不可或缺的组成部分,对其进行管理所需的重视程度往往超出人们的认知。 首先,电缆可能成为振动的传导通道,以不明显的方式影响整个应用装置。 即使是选择将电缆从隔振平台上悬垂下来,也可能对应用的整体稳定性和性能产生深远影响。 当平台移动时,任何被拖拽的电缆都可能导致寄生运动和其他误差。 即使以非拖拽方式布置,刚性电缆也可能产生此类问题。 电缆可能断裂、缠结和松脱,导致难以诊断的过早失效。 通常,这些问题会随着用户堆叠系统中轴数量的增加而加剧。 (所制造的堆叠有时受益于集成式电缆管理。)
- 中心孔径。 许多应用 - 尤其是在光学领域 - 受益于运动堆叠的透射式结构。 这在多轴堆叠结构中难以实现或根本无法实现。
- 尺寸、重量和脆弱性。 简而言之,堆叠系统在高度和质量方面可能相当巨大。 由于底部平台承载着整个高大堆叠的负荷,其轴承容易因意外力而发生压痕损伤和其他损伤。 除了在安装时容易因碰撞而损坏外,这还常常需要拆卸后运输,提高了成本和复杂度,并在重新组装时引入不确定性。
- 正交性和寄生误差。 堆叠轴以复杂的方式相互作用;例如,X轴的跳动会在Y轴和Z轴中表现为非预期运动;轴的角度偏差同样会在其他轴的行程方向上产生运动,其幅度与其到运动轴的距离成正比。 在堆叠系统中,这种放大的杠杆臂效应可能较大。
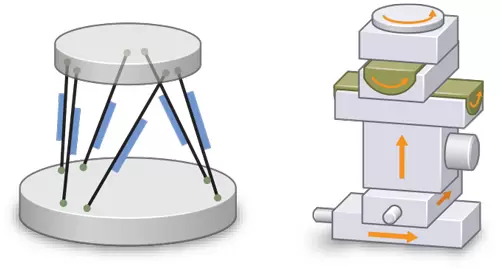
这似乎有些夸张,但利用并联运动原理可以避免所有这些问题。 这类系统不是将全部所需的轴较高地堆叠并将工件置于顶部,而是通过三足或六足位移台结构并联支撑单个工件,形成比堆叠方式更具刚性且更轻的结构。 这类系统的上佳范例采用不移动或移动很小的内部电缆,并方便地集成通向控制器的电缆。 可以消除用户调校要求,同时提供可超越某些特优单轴平台性能的精度和准确度。
当今易用的控制装置
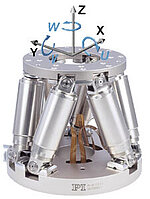
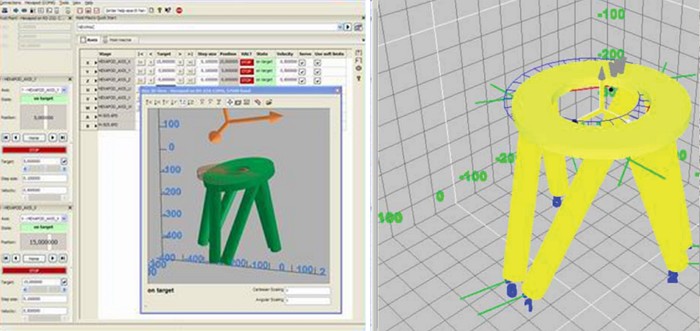
在早些年,选择这类机构的主要障碍是以用户友好的方式控制工件的挑战,这种方式就是使用熟悉的笛卡尔坐标(X、Y、Z、θX、θY、θZ)。 这在三十年前PI推出首个六足位移台定位系统后发生了改变。 该仪器采用完全集成的基于工业PC的数字控制器,运行智能固件,透明地管理坐标转换过程,提供全部六个自由度上未曾达到的灵活控制,并具有可编程旋转中心点,可通过单个软件命令设置。 现在有多种软件工具可用于六自由度的运动仿真和动态模式运动生成,例如用于车辆仿真以及机载平台仿真和测试。
一站式,多种解决方案
这些创新为PI miCos庞大的并联运动机构阵容奠定了基调:创新解决方案的成本实际上可能低于六个性能相当的平台的堆叠系统。 当今的产品受益于机械设计和控制工程多年来的持续进步。 我们最新的控制器集成了超现代的工业级实时操作系统,并提供诸多功能和选项如TTL运动触发、模拟位置的波形定义、带可选模拟输入的标准内部数据记录器以及用于集成到工厂自动化系统和远程访问的高速网络接口等。 其完善的软件支持包括全面的LabVIEW库、MATLAB支持、用于设置和测试的便捷图形用户界面,以及适用于Windows、Linux和OS X的详细文档化动态库。
两大系列6轴并联运动平台
PI提供两种基本的六自由度机构架构:六腿式六足位移台和三腿平面并联机械手。

堆叠系统的多种用途
串联运动平台并无不妥。 它们在许多应用中表现良好,PI提供各种采用步进电机、压电电机和直线电机/空气轴承的标准及定制设计。 然而,当需要4个以上自由度时,六足位移台或混合三脚架的出众性能值得仔细比较。 PI运动控制工程师可以帮助您评估两种设计在您应用中的优势和不足。 更丰富的工具箱和具有多学科经验的全球团队的优势,帮助他们在与客户咨询时借鉴这些经验,选择(或定制开发)理想解决方案,并从其他领域的相关应用中汲取灵感。
深入了解“不可能”的需求!
也许它们确实不可能…或者也许只是需要一种新的方法,或者借鉴其他应用领域的技巧。 关键任务的PI技术是当今许多尖端技术的核心,包括半导体制造和计量、光子封装和测试、基因组学、单分子生物物理学和超分辨率显微镜。