并联运动,六足位移台 (Parallel Kinematics, Hexapods)
六足位移台是带有六个可直接连接到单一平台的驱动器的并联运动系统。这使得用户可以在X、Y、Z和旋转方向的所有自由度中自动定位物体,并且取决于驱动器,具有微米量级或更低的精度。并联运动系统非常富有刚性,借助于只有很低的被动重量才能移动以及相应的设计,可承载高达数吨的负载。用户可以任意选择参考坐标系,当今,工人们正在生产线上与六足位移台协同工作。用户通过EtherCAT将系统集成到自动化环境中。

并联运动压电平台 (Parallel-Kinematic Piezo Stages)
压电平台通过采用电容传感器的并联运动装置达到理想的轨迹精度,从而实现并联测量。在多轴并联运动系统中,所有促动器均直接作用于一个运动平台。这意味着所有轴均移动相同的最小质量,并且可以为其设计相同的动态特性。并联运动系统比串联堆叠系统具有更多的优点,包括更紧凑的结构以及各轴无累积误差。配备直接计量的多轴纳米定位系统能够针对一个共同参照在所有自由度上测量平台位置。在此类系统中,能够立即检测到一个促动器在另一(串扰)方向上的非期望运动,并由伺服回路主动补偿。即使在动态操作中,这一主动轨迹控制概念也能够将轨迹偏差保持在几纳米以下。
PICA/PICA Power
PICA压电陶瓷促动器专为高占空比应用而设计。PICA Power促动器还针对高温工作条件进行了额外优化。
所有使用的材料均经过特殊匹配,以确保鲁棒性和使用寿命。PICA驱动器的耐久性试验已证明了一致的性能,即使在数十亿(1,000,000,000)次循环后依然如此。高位移和低电容的组合提供了出色的动态行为,同时降低了驱动功率要求。
PICMA 多层压电陶瓷促动器 (PICMA Multilayer Piezo Actuators)
PICMA促动器利用间接压电效应,并在相对较低的电压下实现较大的力。它们只需要少量的安装空间。同时,PICMA促动器动力十足,可以达到前所未有的精度。这就是它们在计量技术中用作微泵应用的原因。由于采用陶瓷绝缘材料,PICMA促动器具有高可靠性和耐气候性。PI还为PICMA促动器配备了适合客户应用程序的独立连接器。
PICMAWalk
PICMAWalk驱动器可实现高达50牛的进给力和高达60牛的保持力。最大速度为15毫米/秒。PICMAWalk采用久经考验的PICMA多层压电陶瓷促动器。这意味着将压电控制电压降至120伏。PICMA压电陶瓷促动器还可确保较长的使用寿命和PICMAWalk技术杰出的稳定性。
压电惯性驱动器 (Piezoelectric Inertia Drive)
压电陶瓷惯性驱动器为空间节约型且价格实惠的基于压电陶瓷的驱动器,其保持力相对较大,行程在理论上几乎是无限的。最大工作频率为20千赫兹时,驱动直接作用在动轮上,实现超过5毫米/秒的速度。在20kHz的工作频率下,Q-Motion驱动器运行时静音。驱动器在静止状态下可自锁,无需电流,且不产生任何热量。其能用最大的力保持住位置。因此,在负载循环次数较少时,它适用于电池供电的移动应用。
PiezoMove
PiezoMove促动器将行程长达1毫米的导向运动与供选配的精度高达10纳米的传感器相结合。高精度、无摩擦的柔性铰链导向可实现非常高的刚度以及非常低的横向位移。
这使其比简单的压电陶瓷促动器更易操作,但仍然保持结构十分紧凑。所用压电陶瓷促动器的数量和尺寸将确定刚度和力的生成。正因这些特点以及其小尺寸和经济划算的设计,PiezoMove杠杆促动器尤其适用于OEM应用。
PiezoWalk 步进驱动器 (PiezoWalk Walking Drive)
PiezoWalk驱动器利用压电步进原理,将亚纳米级分辨率与较大的力、稳健的设计和可扩展的行程相结合。行业客户使用步进驱动器,可实现大于1毫米的行程,并以纳米精度的分辨率保持稳定的位置。PI (Physik Instrumente)提供具有高进给力以及定位和保持力的步进驱动器,同时具有相对较高的速度,并且驱动器在真空中也具有较长的使用寿命。
请参见 >> NEXLINE、 >> NEXACT和 >> PICMAWalk。
PIglide空气轴承技术 (PIglide Air Bearing Technology)
PIglide空气轴承技术可实现无摩擦定位,在超过100毫米的范围内具有高达5微弧度的高导向精度。这项技术提高了位置分辨率,并可实现恒速扫描。重复精度只是少量编码器脉冲。使用柔性铰链导向压电纳米定位器,也可以在纳米范围内获得类似精度,然而这仅限于非常短的行程。
PILine 超声波压电电机 (PILine Ultrasonic Piezomotors)
PILine超声波压电电机精度高、动态、小巧、无噪音且自锁。因此,无需在静止时为其供应电流,而这反过来又降低了应用的能量需求。出于这个原因并且由于其尺寸小,这些驱动器尤为适用于光学工业中的移动设备和测量技术,从而可以取代传统的驱动技术。
PIMag 音圈 (PIMag Voice Coil)
音圈驱动器重量轻、体积小并且基于无摩擦驱动原理,因此特别适合在有限行程内要求高动态性和高速度的应用 - 例如,在医疗技术中。与传统的基于传动螺杆的解决方案相比,音圈驱动器为客户带来了更大的优势,尤其在磨损和动力学方面更是如此。这类驱动器还可提供高扫描频率和精密定位,因为它们不存在磁滞效应。
请参见 >> 音圈驱动器。
行星齿轮 (Planetary Gears)
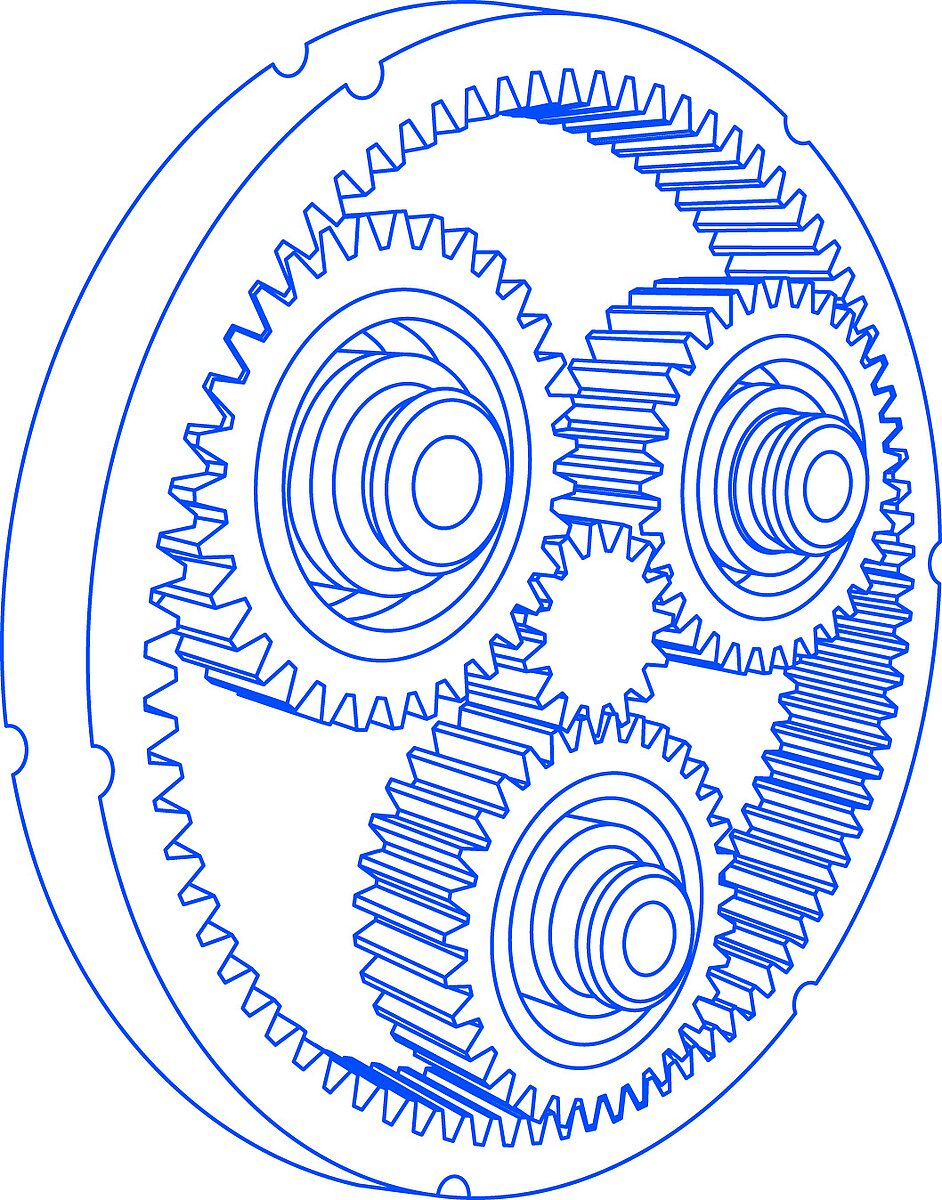
行星齿轮由连接到轴的中心太阳轮以及位于环形轮内的其他行星轮组成。由于通过几个齿轮分配负载,行星齿轮适合传递高扭矩。采用这种方式,可以在非常紧凑的装配空间中实现高传动比。为降低高速噪声,输入平台的齿轮通常由合成材料制成。对于真空、高温或非常高扭矩的应用,输入平台最好由钢制成。除正齿轮外,行星齿轮通常也用于PI线性平台中的齿轮电机。
预载压电陶瓷促动器 (Preloaded Piezo Actuator)
压电堆叠促动器由内部预载保护。预载确保在任何应用场景下都能安全运行,是动态应用和拉伸载荷的理想选择。预载压电陶瓷促动器旨在集成到客户的系统中,并且无导向。如果无法接受单个轴上的运动串扰,则需要外部导向。
脉冲宽度调制(PWM) (Pulse Width Modulation (PWM))
PWM控制的电机可通过高频信号控制(电机)性能。这意味着功率信号可以与数字控制信号相分离。
PWM控制器与高性能开关式放大器一起用于压电陶瓷促动器,或者用于控制线性电机或音圈驱动器等电机。 >> ActiveDrive电机是PI的一项专有功能,请参见此处。