C-887.3111
用于六足位移台的6轴控制器,集成BLDC电机驱动器,TCP/IP,RS-232,19" 2RU机箱,模拟输入

C-887.4511
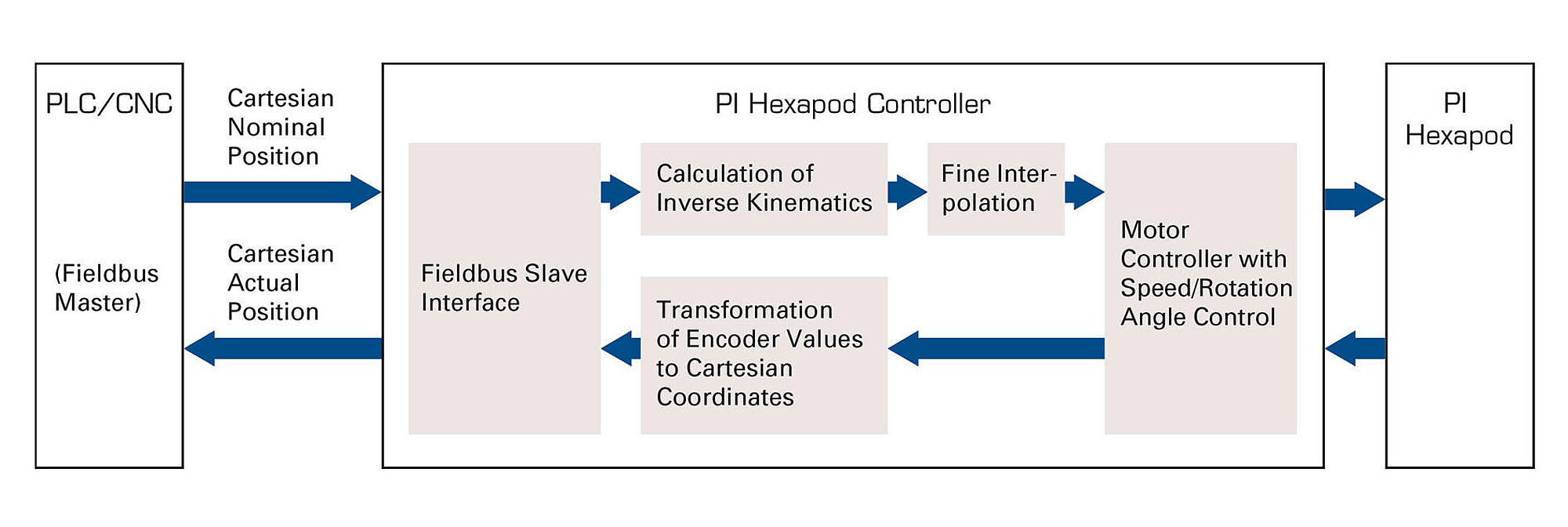
将六足位移台运动控制器集成到自动化系统中
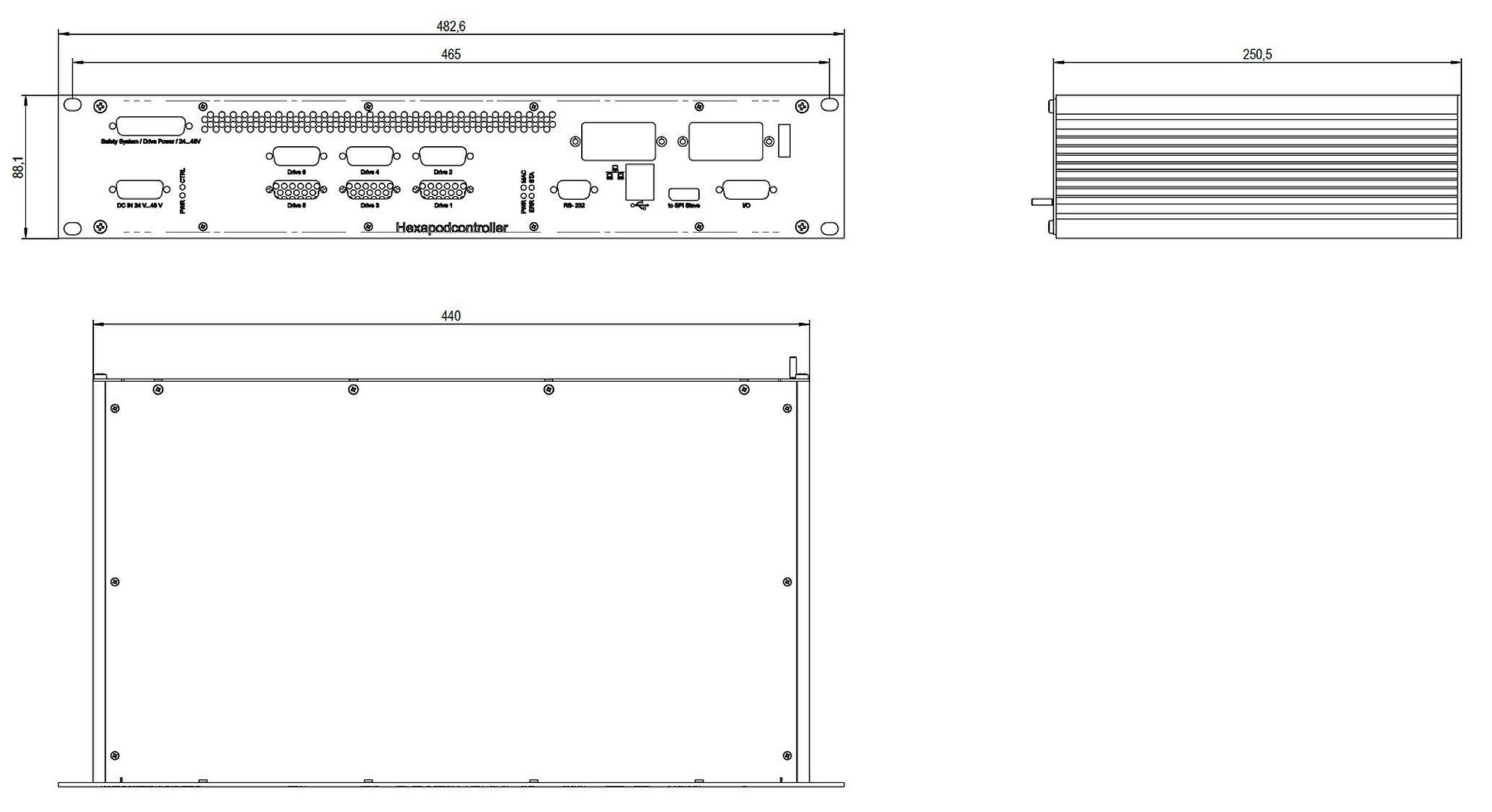
C-887.3x和C-887.4x,尺寸单位为mm。 请注意,在图中使用逗号代表小数点。



工业用六足位移台控制器
结构紧凑的控制器,集成驱动器,用于控制工业应用中的六足位移台。 该控制器适用于驱动配备BLDC电机且本体不含电机驱动器的并联机构。 支持配备电机制动器并通过BiSS C连接编码器的六足位移台。 根据具体版本并结合适当硬件,该控制器可以满足EN IEC 62061中SIL 3的要求,从而为安全相关应用提供高等级功能安全保障。
操作
六足位移台系统的操作简单直观,因为位置采用直角坐标输入。 在每个伺服周期内,控制器根据输入的目标位置计算六足位移台的控制量。 用户可以根据具体安装情况调整坐标系统(工作、工具),以便定制集成六足位移台系统。 旋转中心可在空间中自由定义。 数据记录器可以记录工作数据,例如电机控制、速度、位置或位置误差。 在控制器上执行宏和Python脚本可实现独立运行。
接口
搭配GCS 2.0指令集,用于PI定位系统:
根据版本不同:
广泛软件支持
通过基于GCS的接口进行控制。 例如,PIMikroMove用户软件可将快速对准程序以图形方式直观显示。 提供丰富的驱动程序,例如适用于C、C++、C#、NI LabVIEW、MATLAB和Python。 PIHexapodEmulator可在无硬件条件下实现虚拟启动和操作。
供货范围
包括控制器和软件包。 不含电源适配器。 PI提供24V电源作为配件(订单号C-501.24250D3W3),可使控制器作为实验室设备运行。
建议与控制器一起订购六足位移台机械本体和合适的六足位移台成套电缆,以便在出厂前匹配零部件。 根据控制器版本不同,以下部件需由客户提供:
| 基础 | C-887.3111 | C-887.3511 | C-887.4101 | C-887.4111 | C-887.4511 | |
|---|---|---|---|---|---|---|
| 外壳类型 | 机架安装 19" 2 U | 机架安装 19" 2 U | 机架安装 19" 2 U | 机架安装 19" 2 U | 机架安装 19" 2 U | |
| 驱动类型 | 无刷直流电机 ǀ 无刷直流齿轮电机 | 无刷直流电机 ǀ 无刷直流齿轮电机 | 无刷直流电机 ǀ 无刷直流齿轮电机 | 无刷直流电机 ǀ 无刷直流齿轮电机 | 无刷直流电机 ǀ 无刷直流齿轮电机 | |
| 轴 | 6 | 6 | 6 | 6 | 6 | |
| 处理器 | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | |
| 与应用相关的功能 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | |
| 保护功能 | 出现错误时关闭伺服模式 ǀ 电机过热保护 | 出现错误时关闭伺服模式 ǀ 电机过热保护 | 出现错误时关闭伺服模式 ǀ 电机过热保护 | 出现错误时关闭伺服模式 ǀ 电机过热保护 | 出现错误时关闭伺服模式 ǀ 电机过热保护 | |
| 功能安全 | — | — | STO(安全切断扭矩) ǀ SS1-t (Safe Stop 1 time controlled) | STO(安全切断扭矩) ǀ SS1-t (Safe Stop 1 time controlled) | STO(安全切断扭矩) ǀ SS1-t (Safe Stop 1 time controlled) | |
| 配置管理 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | |
| 受支持的ID芯片 | ID芯片2.0 | ID芯片2.0 | ID芯片2.0 | ID芯片2.0 | ID芯片2.0 | |
| 运动和控制 | C-887.3111 | C-887.3511 | C-887.4101 | C-887.4111 | C-887.4511 | |
| 受支持的传感器信号 | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | |
| 控制变量 | 位置 | 位置 | 位置 | 位置 | 位置 | |
| 最大控制频率(伺服周期) | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz | |
| 运动类型 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | |
| 运动协调 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | |
| 参考点开关输入 | TTL | TTL | TTL | TTL | TTL | |
| 限位开关输入 | TTL | TTL | TTL | TTL | TTL | |
| 电机制动器信号 | 每个六足腿集成一个制动驱动器,最大电流2A | 每个六足腿集成一个制动驱动器,最大电流2A | 每个六足腿集成一个制动驱动器,最大电流2A | 每个六足腿集成一个制动驱动器,最大电流2A | 每个六足腿集成一个制动驱动器,最大电流2A | |
| 接口和操作 | C-887.3111 | C-887.3511 | C-887.4101 | C-887.4111 | C-887.4511 | |
| 通信接口 | RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | EtherCAT从控制器 ǀ RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | EtherCAT从控制器 ǀ RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | |
| 启/停开关 | 硬件开关开/关 | 硬件开关开/关 | 硬件开关开/关 | 硬件开关开/关 | 硬件开关开/关 | |
| 显示器和指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | EtherCAT通信 ǀ 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | EtherCAT通信 ǀ 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | |
| 手动控制 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | |
| 指令集 | GCS 2.0 | GCS 2.0 | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| 用户软件 | PIMikroMove | PIMikroMove | PIMikroMove | PIMikroMove | PIMikroMove | |
| 应用程序编程接口 | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| 模拟输入 | 6 | 6 | 4 | 6 | 6 | |
| 模拟输入信号 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | 4路-10V至+10V,12位 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | |
| 数字输入 | 4 | 4 | 4 | 4 | 4 | |
| 数字输入信号 | TTL | TTL | TTL | TTL | TTL | |
| 数字输出 | 4 | 4 | 4 | 4 | 4 | |
| 数字输出信号 | TTL | TTL | TTL | TTL | TTL | |
| 工业Ethernet协议 | — | EtherCAT | — | — | EtherCAT | |
| EtherCAT设备类别 | — | EtherCAT从控制器 | — | — | EtherCAT从控制器 | |
| EtherCAT通信协议 | — | EtherCAT上的CAN应用协议(CoE) | — | — | EtherCAT上的CAN应用协议(CoE) | |
| 为EtherCAT实施的驱动曲线 | — | CiA402驱动曲线(IEC 61800-7-201) | — | — | CiA402驱动曲线(IEC 61800-7-201) | |
| 根据CiA402标准,受支持的工作模式 | — | 回零模式 ǀ 周期性同步位置模式(CSP) ǀ 用于激活坐标系的安全基本状态(无模式变化/未选择模式) | — | — | 回零模式 ǀ 周期性同步位置模式(CSP) ǀ 用于激活坐标系的安全基本状态(无模式变化/未选择模式) | |
| EtherCAT周期时间 | — | ≥1 ms | — | — | ≥1 ms | |
| EtherCAT同步模式 | — | 分布式时钟(DC) ǀ 与SYNC0事件同步 | — | — | 分布式时钟(DC) ǀ 与SYNC0事件同步 | |
| 电气性能 | C-887.3111 | C-887.3511 | C-887.4101 | C-887.4111 | C-887.4511 | |
| 输出电压 | 同工作电压;24或48 V | 同工作电压;24或48 V | 同工作电压;24或48 V | 同工作电压;24或48 V | 同工作电压;24或48 V | |
| 每通道平均输出电流 | 1000 mA | 1000 mA | 1000 mA | 1000 mA | 1000 mA | |
| 每个通道的峰值输出电流 | 2000 mA | 2000 mA | 2000 mA | 2000 mA | 2000 mA | |
| 其他 | C-887.3111 | C-887.3511 | C-887.4101 | C-887.4111 | C-887.4511 | |
| 电机/促动器连接器 | 6 × HD D-sub 26针 (母头) | 6 × HD D-sub 26针 (母头) | 6 × HD D-sub 26针 (母头) | 6 × HD D-sub 26针 (母头) | 6 × HD D-sub 26针 (母头) | |
| 连接器模拟输入 | BNC ǀ HD D-sub 26针(母头) | BNC ǀ HD D-sub 26针(母头) | HD D-sub 26针(母头) | BNC ǀ HD D-sub 26针(母头) | BNC ǀ HD D-sub 26针(母头) | |
| 连接器数字输入 | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | |
| 连接器数字输出 | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | |
| 连接器安全开关 | D-sub 9W4(母头) | D-sub 9W4(母头) | D-sub 9W4(母头) | D-sub 9W4(母头) | D-sub 9W4(母头) | |
| 连接器TCP/IP | RJ45插座,8P8C | RJ45插座,8P8C | RJ45插座,8P8C | RJ45插座,8P8C | RJ45插座,8P8C | |
| 连接器RS-232 | D-sub 9(公头) | D-sub 9(公头) | D-sub 9(公头) | D-sub 9(公头) | D-sub 9(公头) | |
| 连接器EtherCAT | — | RJ45插座,8P8C | — | — | RJ45插座,8P8C | |
| 电源电压连接器 | D-sub 3W3(公头) | D-sub 3W3(公头) | D-sub 3W3(公头) | D-sub 3W3(公头) | D-sub 3W3(公头) | |
| 工作电压 | 24或48 V | 24或48 V | 24或48 V | 24或48 V | 24或48 V | |
| 电源适配器 | 不含在发货范围内 | 不含在发货范围内 | 不含在发货范围内 | 不含在发货范围内 | 不含在发货范围内 | |
| 最大电流消耗 | 15 A | 15 A | 15 A | 15 A | 15 A | |
| 工作温度范围 | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | |
| 总质量 | 5700 g | 5940 g | 5600 g | 5700 g | 5940 g |
连接器安全开关:C-887.3111和C-887.3511型号不支持STO和SS1-t安全功能。 对于这些型号,必须将随附的短路插塞连接到D-sub 9W4接头(母头),六足位移台方可运行。
功能安全:
要实现STO和SS1-t安全功能,C-887.4x必须与具有有效EC型式检验证书的安全继电器配合使用。 安全继电器不包含在发货范围内,必须由操作员提供。
受支持的传感器信号:BiSS-C支持传输来自绝对编码器或增量编码器的信号。
工作电压:
24V运行时为24V±5%
48V运行时为48V±5%
仅当PI确认所连接的六足位移台适用于48V运行时,方可使用48V电源为控制器供电。 详情请咨询。
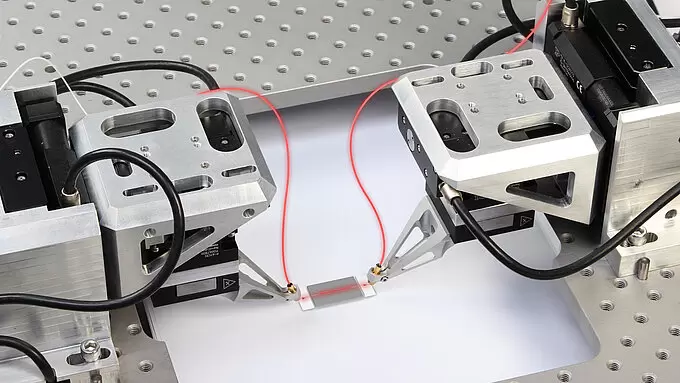
Hexapod Systems: Hexapod H-815 with C-887.3x/.4x Controller with Integrated Drivers for BLDC Motors
C-887 Hexapod Controller, Models C-887.3111, C-887.3511, C-887.4101, C-887.4111, C-887.4511
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2手动控制单元
EtherCAT Interface of C-887 Hexapod Controllers
六足位移台微型机器人坐标系统说明
Description of PIHexapodEmulator software
Fast Multi-Channel Photonics Alignment of Silicon Photonics Components with F-713 Alignment Systems and Hexapods from PI. PILightning Option for First Light Search
六足位移台的运动。空间中的位置和方向,旋转中心。
Product Description and Safety Instructions for Power Adapter C-501.24250D3W3
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
用于六足位移台的6轴控制器,集成BLDC电机驱动器,TCP/IP,RS-232,19" 2RU机箱,模拟输入
用于六足位移台的6轴控制器,集成BLDC电机驱动器,TCP/IP,RS-232,19" 2RU机箱,EtherCAT接口,模拟输入
用于六足位移台的6轴控制器,集成BLDC电机驱动器,支持STO和SS1-t安全功能,TCP/IP,RS-232,19" 2RU机箱
用于六足位移台的6轴控制器,集成BLDC电机驱动器,支持STO和SS1-t安全功能,TCP/IP,RS-232,19" 2RU机箱,模拟输入
用于六足位移台的6轴控制器,集成BLDC电机驱动器,支持STO和SS1-t安全功能,TCP/IP,RS-232,19" 2RU机箱,EtherCAT 接口,模拟输入