H-815.D6A3
用于工业精密应用的六足位移台;无刷直流电机;有效载荷为10kg;最大速度为20mm/s;绝对编码器。 连接电缆不包含在发货范围内,需单独订购。

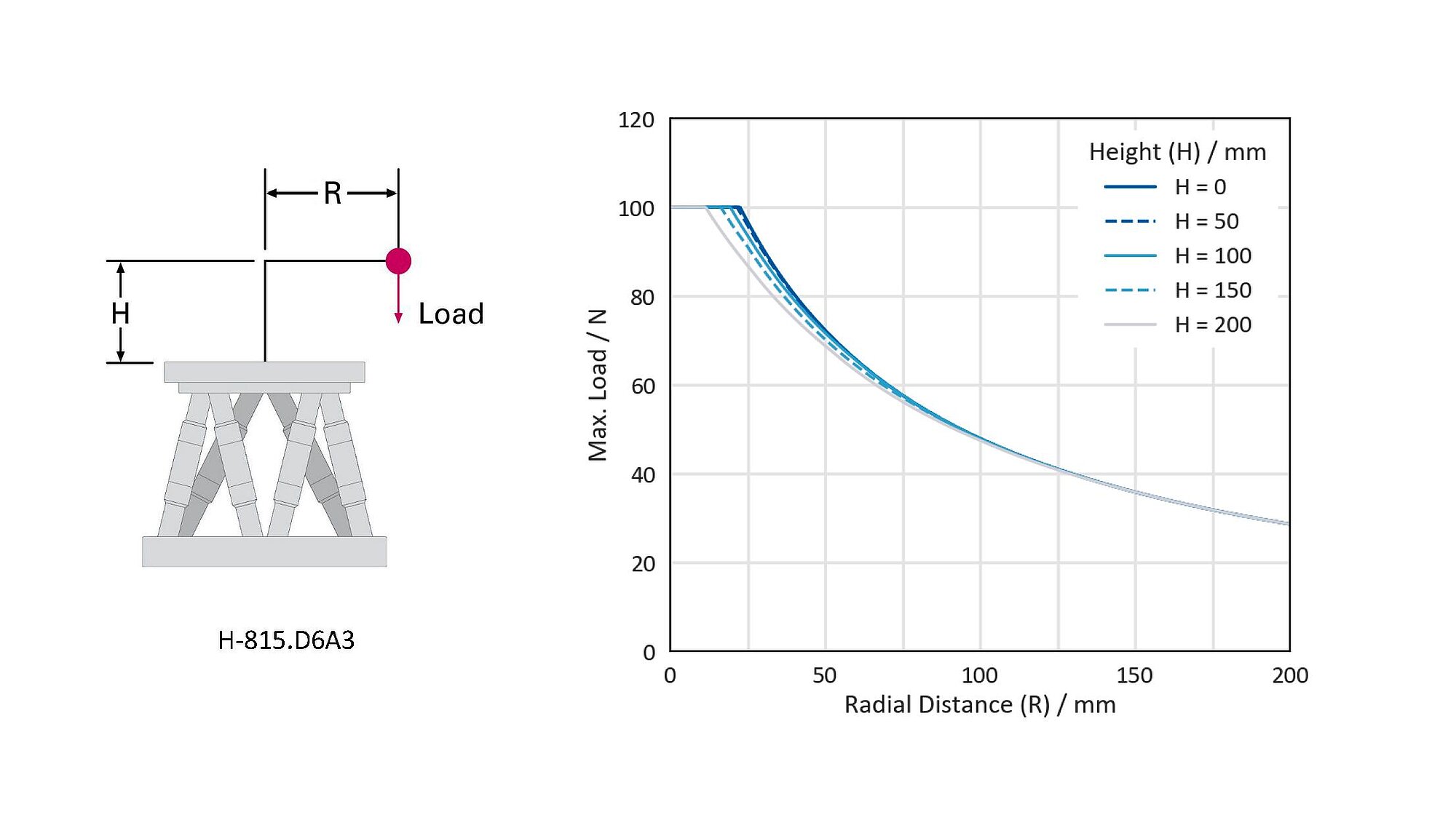
水平安装时H-815.D6A3上的最大负载
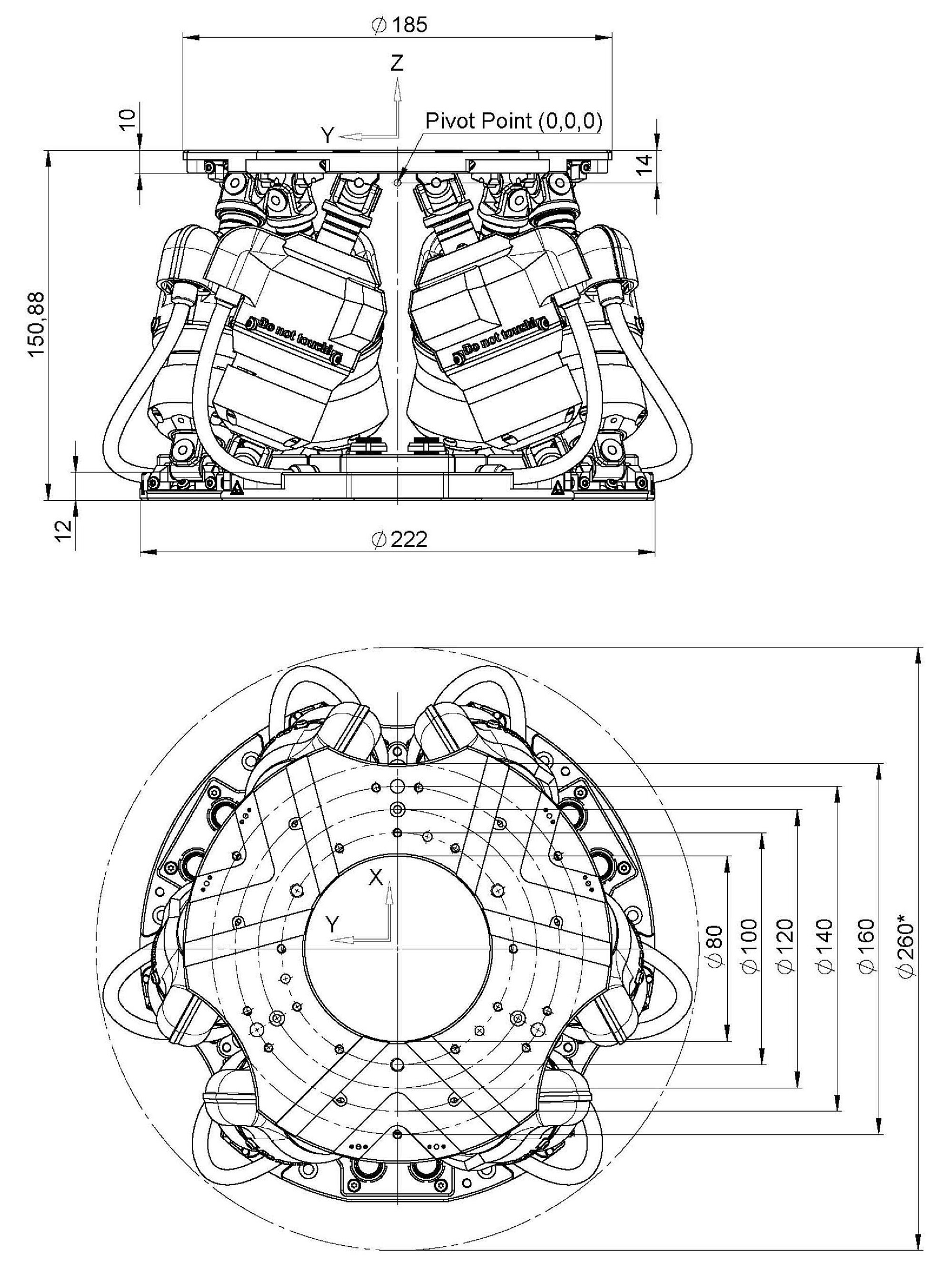
H-815尺寸图(单位:mm,标称零位状态) 请注意,在图中使用逗号代表小数点。 *含线缆时的最大落地面积可能有所不同。
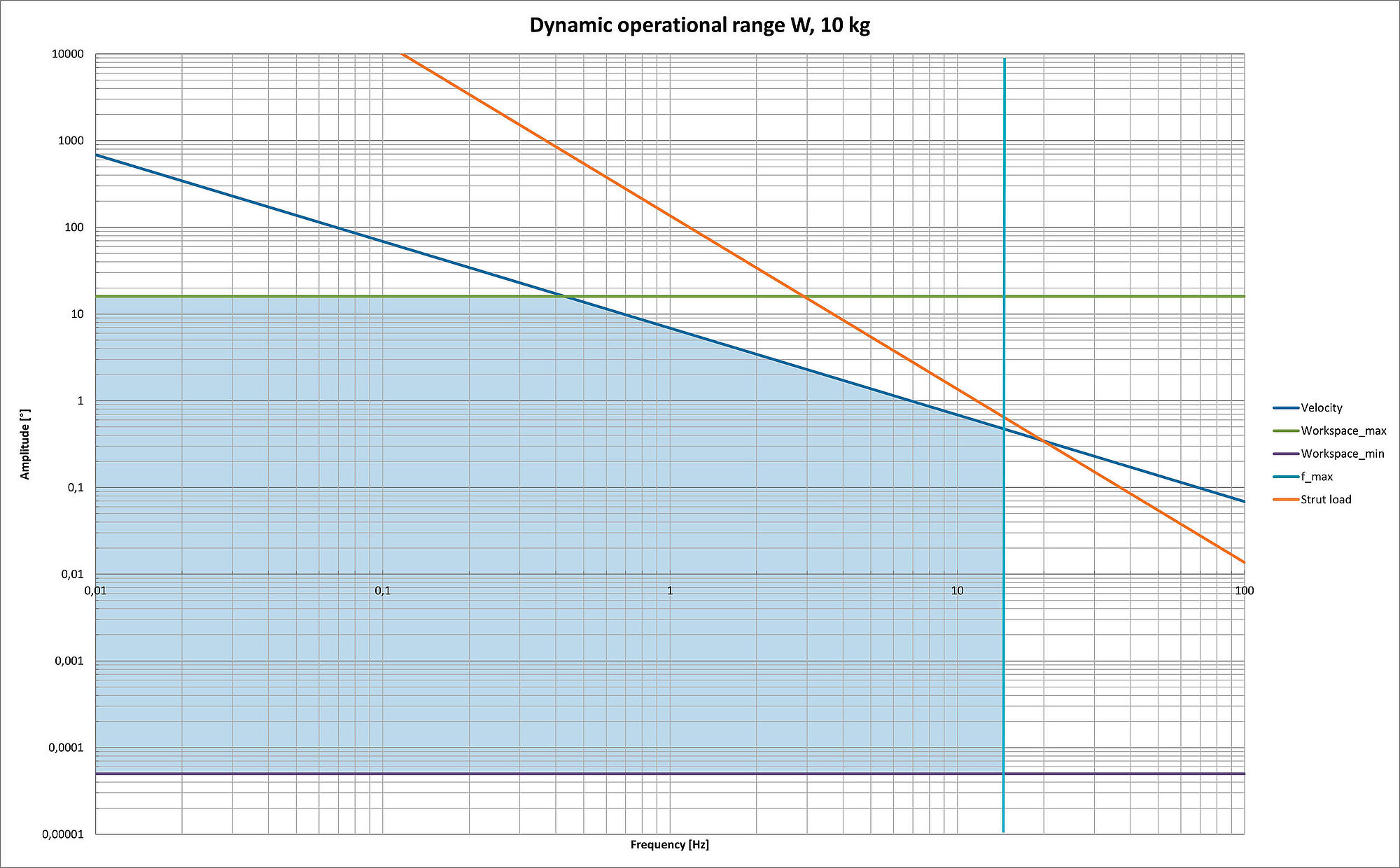
H-815.D6A3的动态工作范围,W (ƟZ), 10kg
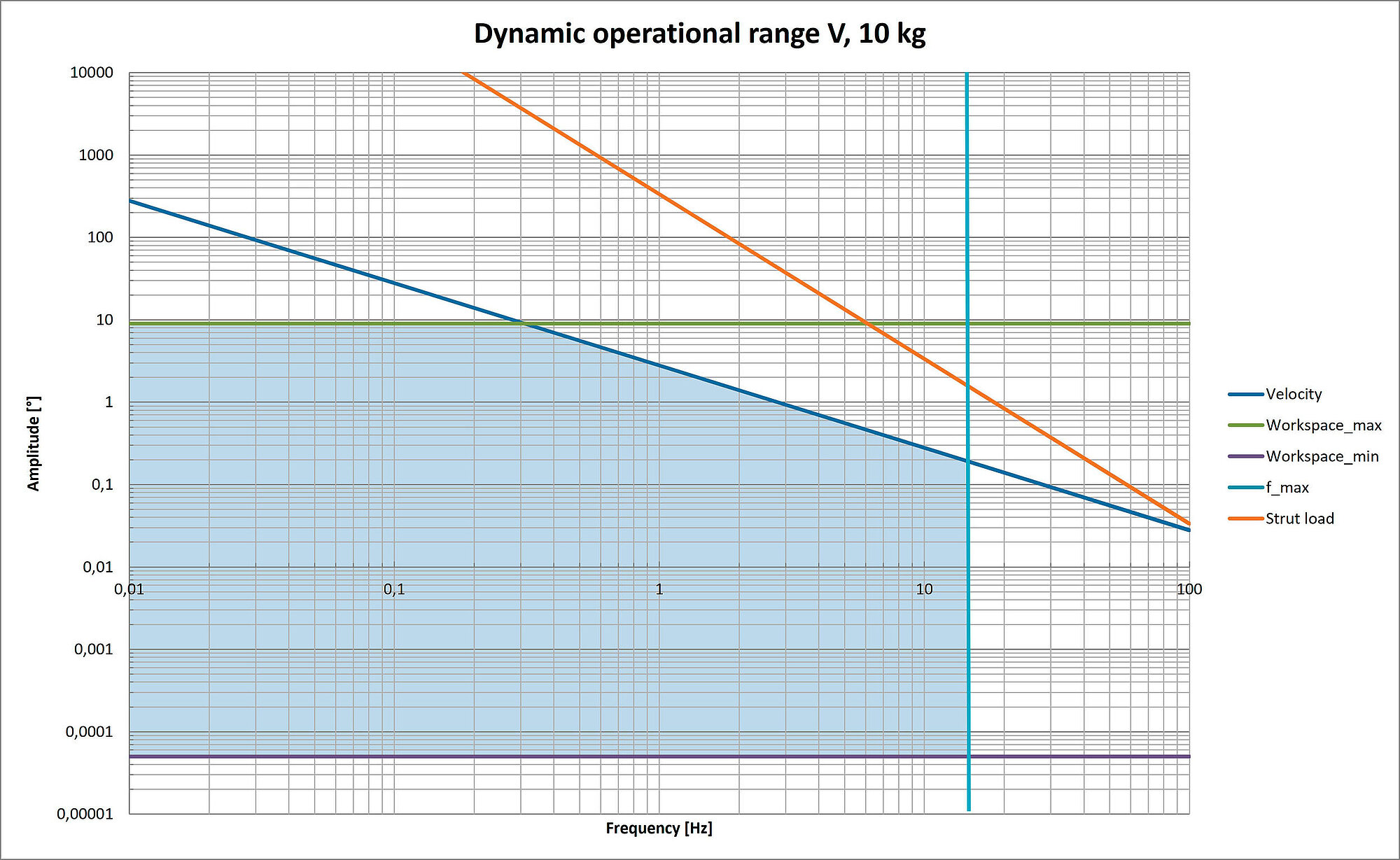
H-815.D6A3的动态工作范围,V (ƟY), 10kg
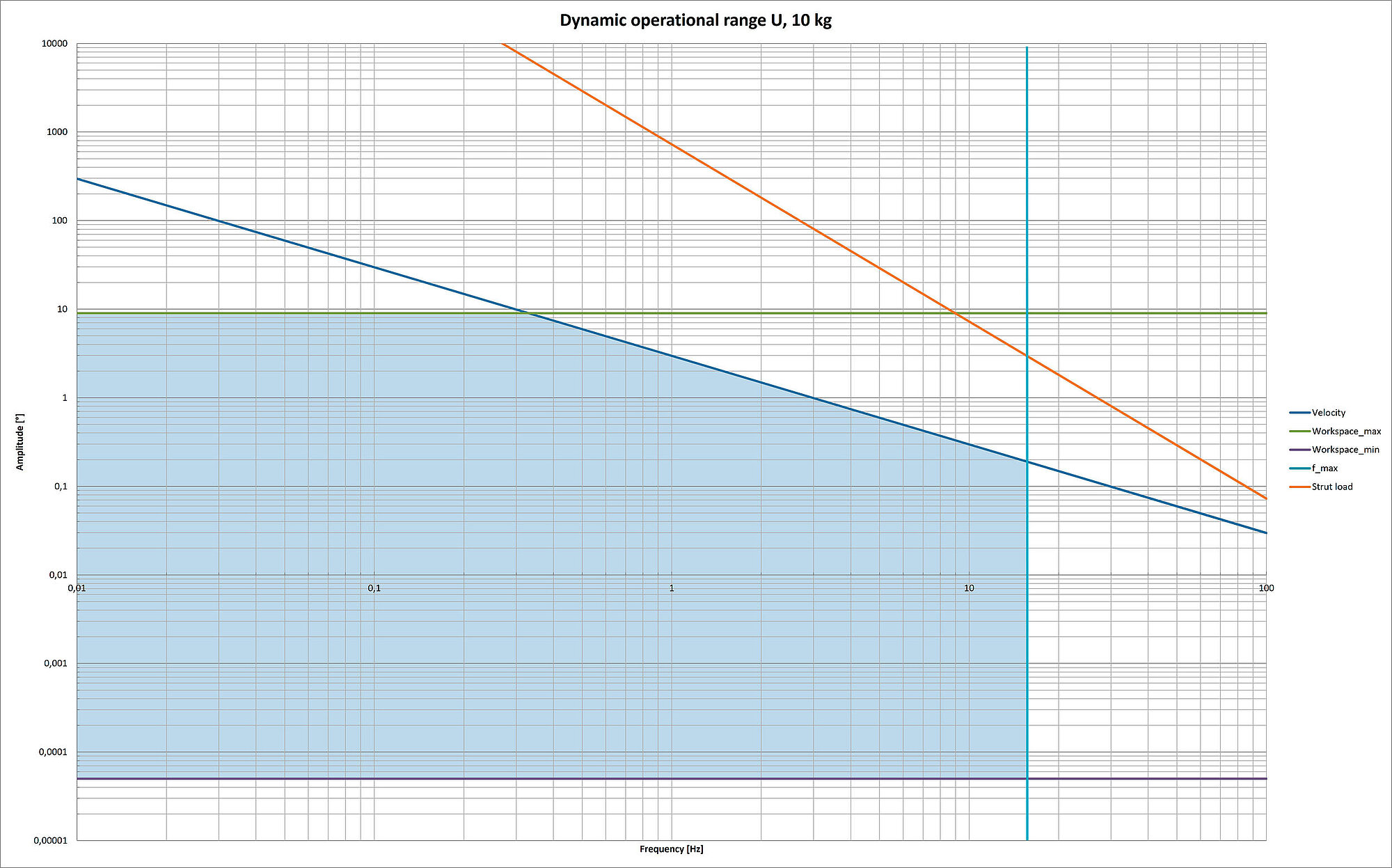
H-815.D6A3的动态工作范围,U (ƟX), 10kg
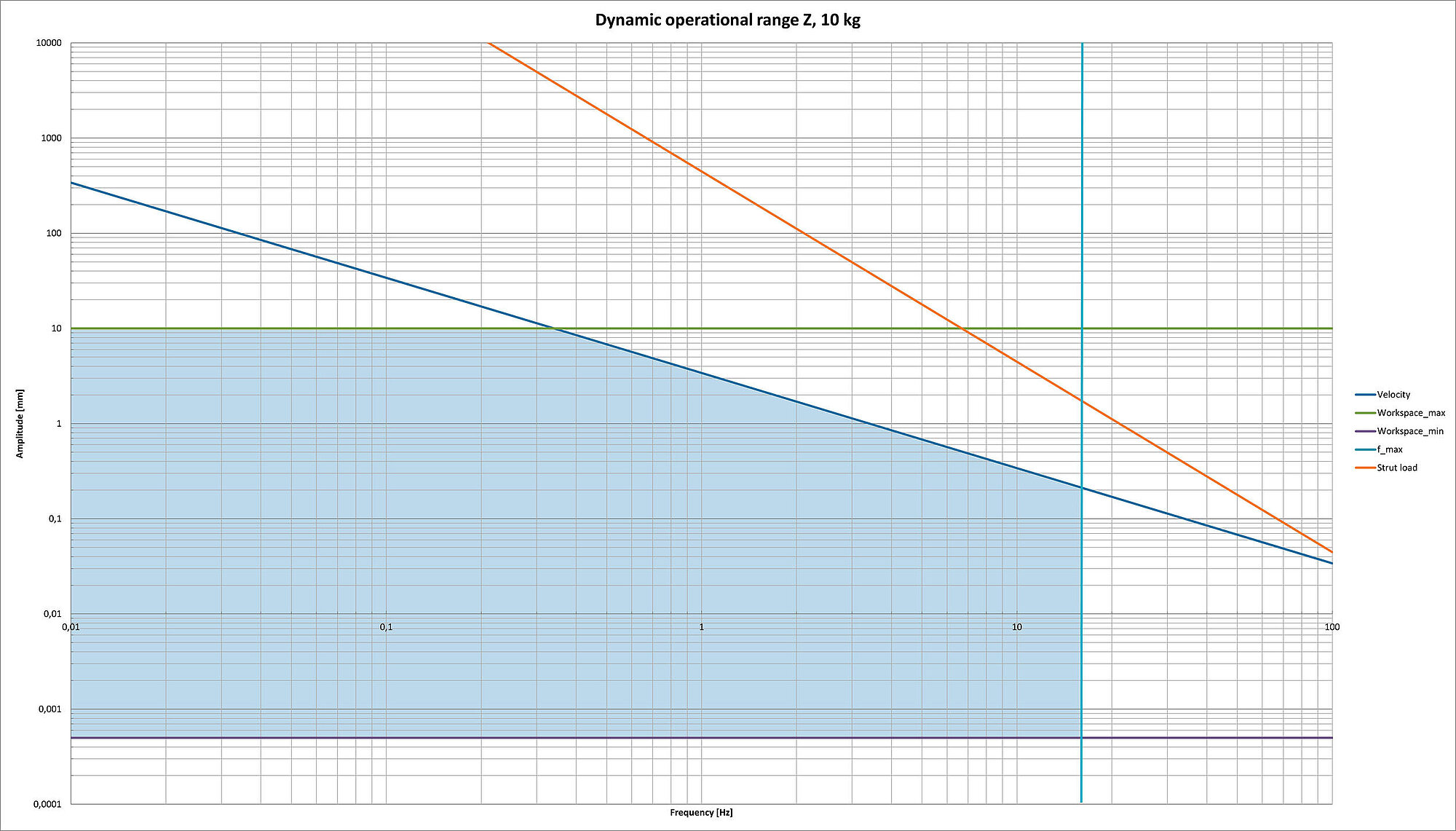
H-815.D6A3的动态工作范围,Z, 10kg
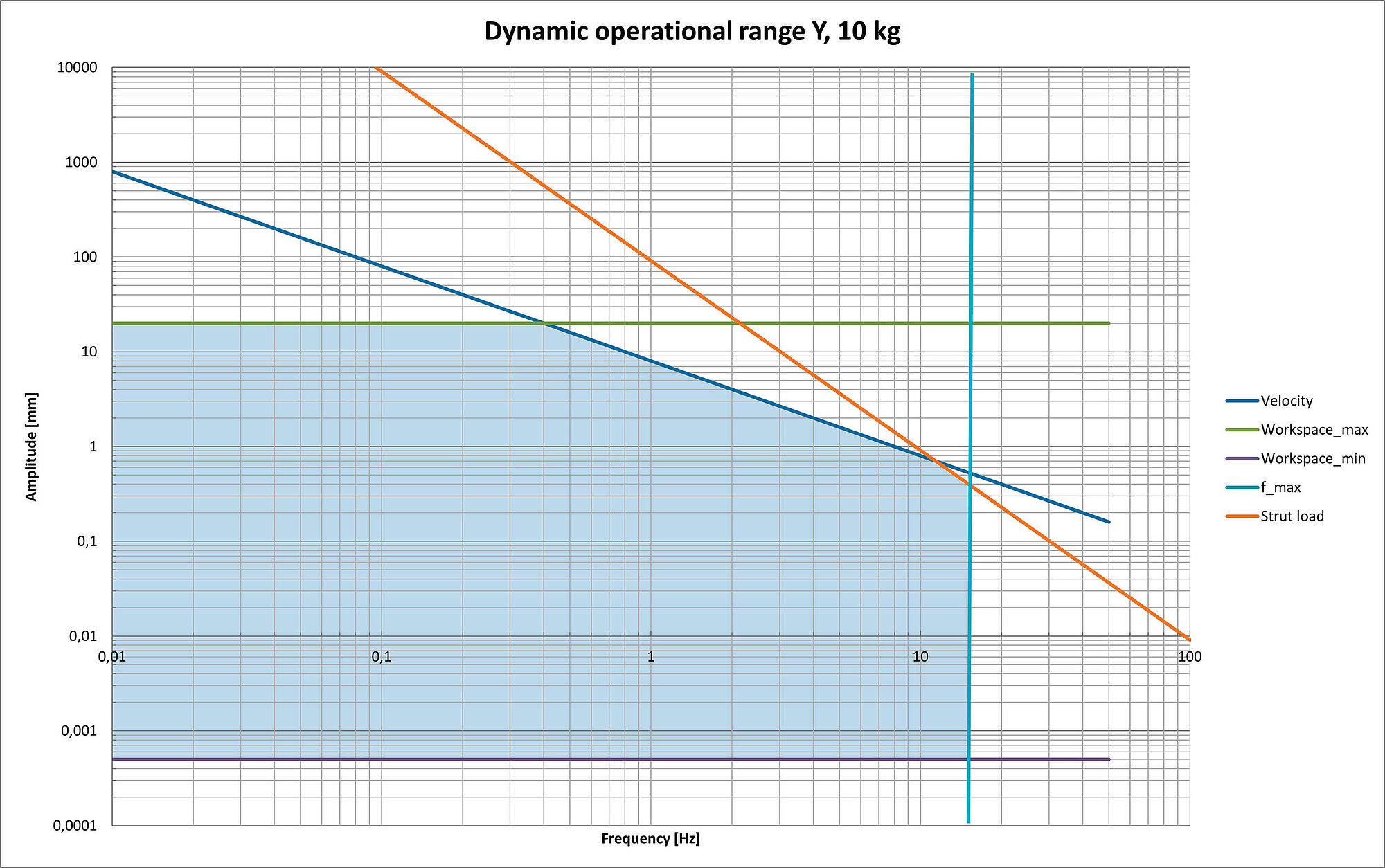
H-815.D6A3的动态工作范围,Y, 10kg
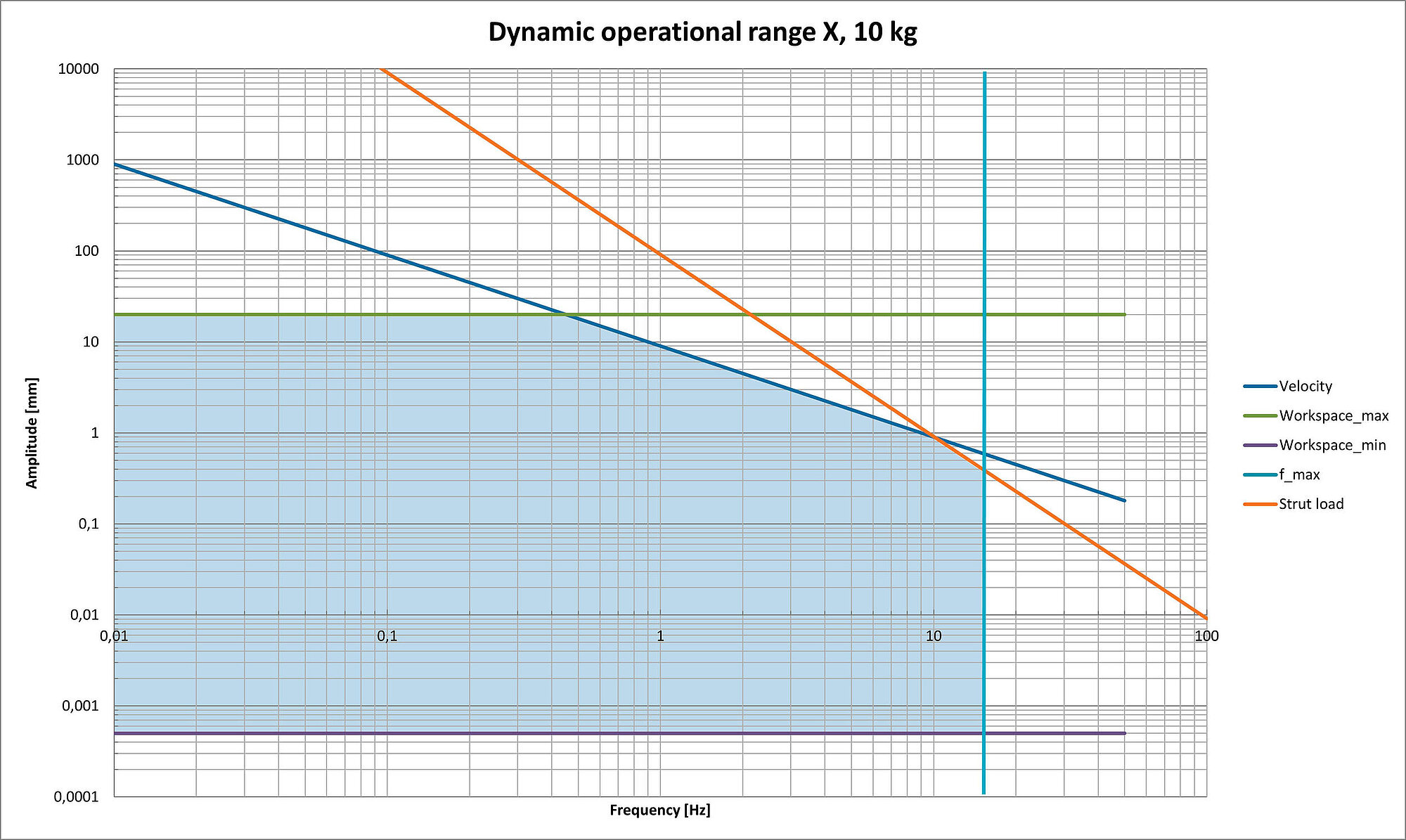
H-815.D6A3的动态工作范围,X, 10kg
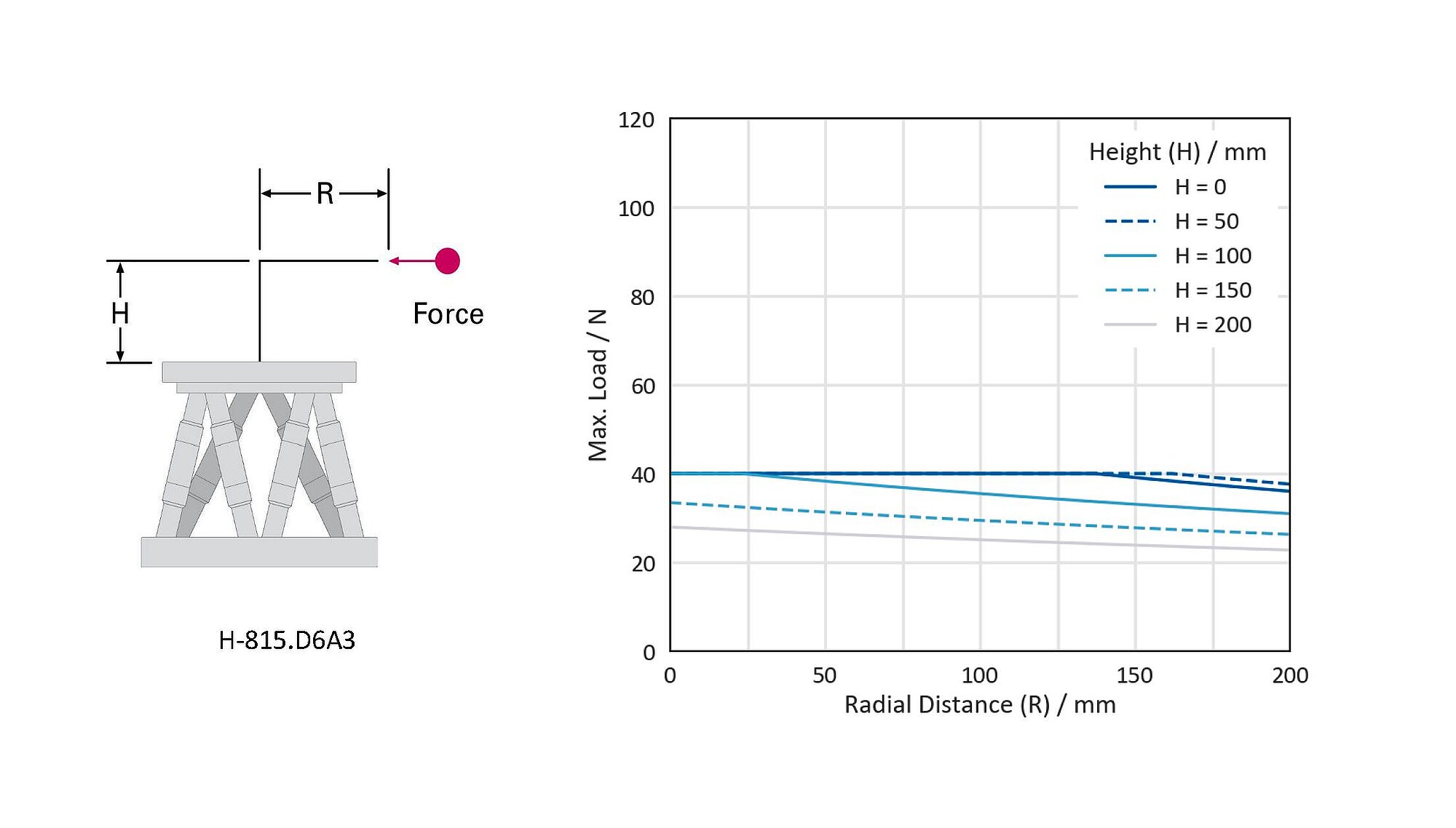
水平安装时作用于H-815.D6A3的最大允许力
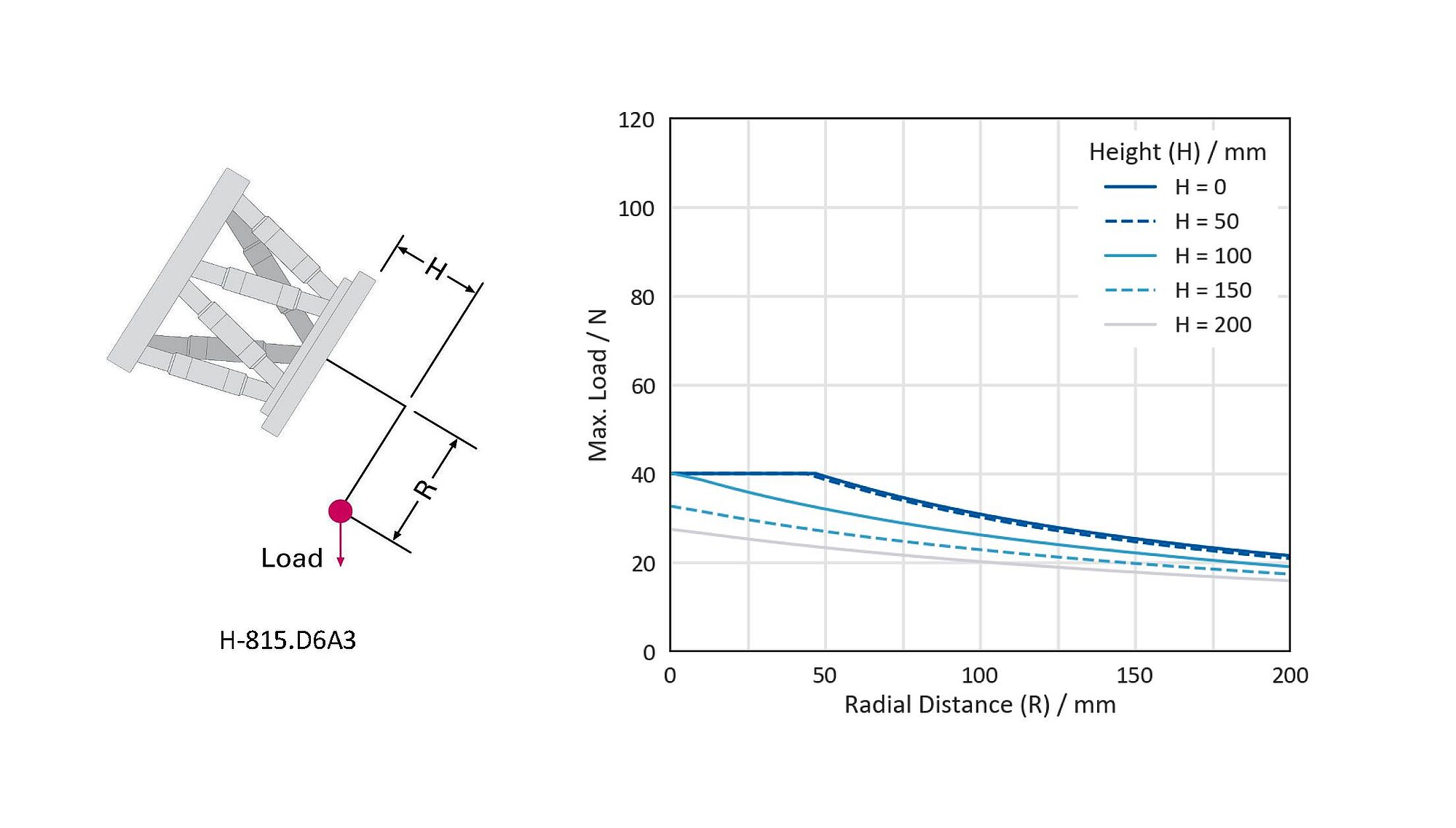
以最不利角度安装时H-815.D6A3上的最大负载
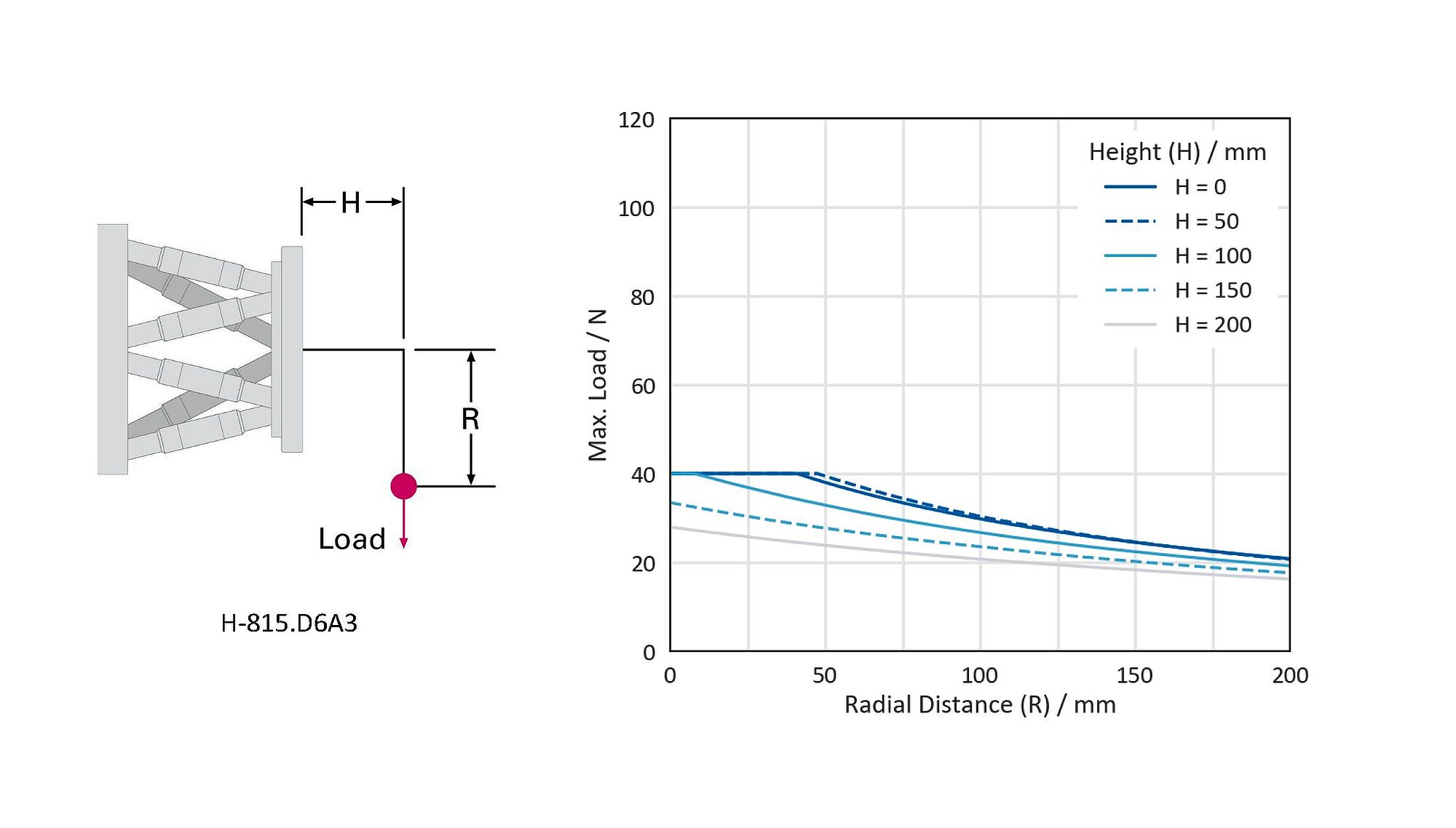
垂直安装时H-815.D6A3上的最大负载
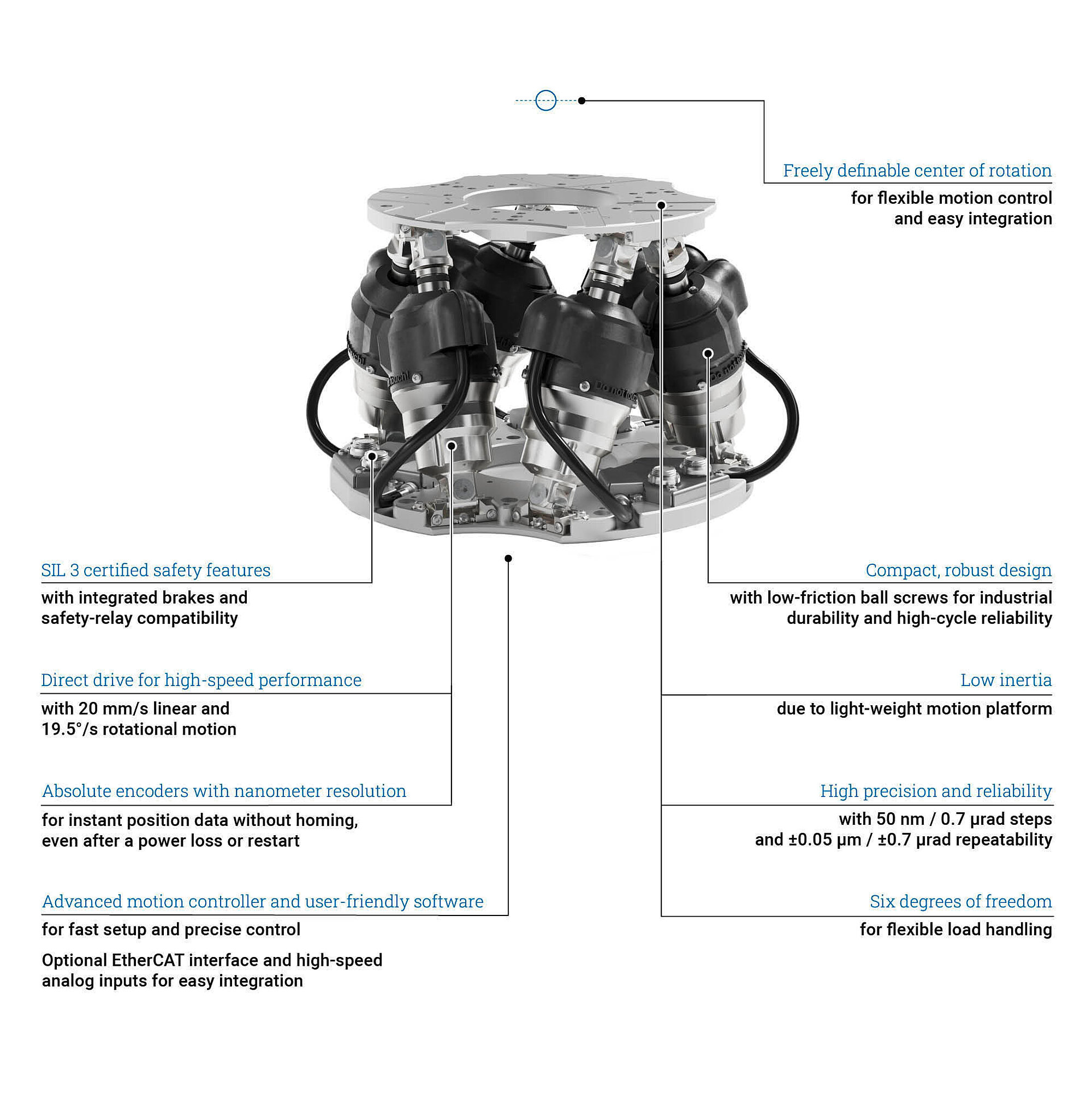













H-815是一款专为光子学等严苛对准工艺打造的高精度多轴运动定位系统。 凭借其精度与重复性,它适合对准与装配微小器件,例如透镜及各类光学元件。 该六足位移台可在6个自由度下快速、准确、稳定地完成复杂定位任务。 其工业级加固设计带来了其耐用性与可靠性, 适合在工业自动化与装配流程中长期运行,帮助提升复杂制造与计量工艺的产能与稳定性。
应用领域
可实现高负载、24/7全天候运行的Stewart平台
H-815以高可靠性、高速度和高精度运动见长,因而适用于硅光子、半导体制造、光学以及计量等领域。 它兼具精度、灵活性与耐用性,是现代高精度对准任务的理想选择。 H-815工业六足位移台是一套紧凑而坚固的并联运动系统,专为工业环境下24/7全天候运行而设计。
方寸之间,高度稳固
H-815采用并联运动结构,可在高度紧凑的设计下实现六自由度运动。 低矮机身设计(高度155mm、底板直径222mm),加之最高10kg的有效载荷,使其能够轻松集成到现有产线中;无论安装方向如何变化,均能实现定位可靠,性能稳定一致。 速度方面,H-815最高可达20mm/s;精度方面,最小位移0.05µm,重复精度可达±0.05µm。 最大行程范围为线性轴±20mm,旋转轴±16°。 设备内置制动器,在有限安装空间内进一步提升了安全性与坚固性。 绝对编码器支持开机即用,无需找参考位,在实现高定位精度的同时,提升效率与工艺可靠性。
| 运动 | H-815.D6A3 | 公差 |
|---|---|---|
| 主动轴 | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| X向的行程 | ± 20 mm | |
| Y向的行程 | ± 20 mm | |
| Z向的行程 | ± 10 mm | |
| θX向的旋转范围 | ± 9 ° | |
| θY向的旋转范围 | ± 9 ° | |
| θZ向的旋转范围 | ± 16 ° | |
| X向的最大速度 | 20 mm/s | |
| 推荐速度(X) | 15 mm/s | |
| Y向的最大速度 | 20 mm/s | |
| 推荐速度(Y) | 15 mm/s | |
| Z向的最大速度 | 20 mm/s | |
| 推荐速度(Z) | 15 mm/s | |
| θX向的最大角速度 | 340 mrad/s | |
| 推荐角速度(θX) | 170 mrad/s | |
| θY向的最大角速度 | 340 mrad/s | |
| 推荐角速度(θY) | 170 mrad/s | |
| θZ向的最大角速度 | 680 mrad/s | |
| 推荐角速度(θZ) | 340 mrad/s | |
| X向的振幅-频率乘积 | 9 mm·Hz | |
| Y向的振幅-频率乘积 | 8 mm·Hz | |
| Z向的振幅-频率乘积 | 3.4 mm·Hz | |
| θX向的振幅-频率乘积 | 3 °·Hz | |
| θY向的振幅-频率乘积 | 3 °·Hz | |
| θZ向的振幅-频率乘积 | 6.9 °·Hz | |
| X向的振幅-频率²乘积 | 91.2 mm·Hz² | |
| Y向的振幅-频率²乘积 | 91.2 mm·Hz² | |
| Z向的振幅-频率²乘积 | 445.8 mm·Hz² | |
| θX向的振幅-频率²乘积 | 725.6 °·Hz² | |
| θY向的振幅-频率²乘积 | 335 °·Hz² | |
| θZ向的振幅-频率²乘积 | 136.4 °·Hz² | |
| 振幅误差 | 5 % | max. |
| 最大频率 | 30 Hz | |
| 定位 | H-815.D6A3 | 公差 |
| X向的最小位移 | 0.08 µm | typ. |
| Y向的最小位移 | 0.08 µm | typ. |
| Z向的最小位移 | 0.05 µm | typ. |
| θX向的最小位移 | 1 µrad | typ. |
| θY向的最小位移 | 1 µrad | typ. |
| θZ向的最小位移 | 0.7 µrad | typ. |
| X向的单向重复精度 | ± 0.09 µm | typ. |
| Y向的单向重复精度 | ± 0.09 µm | typ. |
| Z向的单向重复精度 | ± 0.05 µm | typ. |
| θX向的单向重复精度 | ± 1 µrad | typ. |
| θY向的单向重复精度 | ± 1 µrad | typ. |
| θZ向的单向重复精度 | ± 0.7 µrad | typ. |
| X向的空回 | 2 µm | typ. |
| Y向的空回 | 2 µm | typ. |
| Z向的空回 | 0.1 µm | typ. |
| θX向的空回 | 1.6 µrad | typ. |
| θY向的空回 | 1.6 µrad | typ. |
| θZ向的空回 | 26.1 µrad | typ. |
| 集成传感器 | 绝对式旋转编码器,多圈 | |
| 驱动性能 | H-815.D6A3 | 公差 |
| 驱动类型 | 无刷直流电机 | |
| 标称电压 | 24 V | |
| 机械性能 | H-815.D6A3 | 公差 |
| X向的刚性 | 0.7 N/µm | |
| Y向的刚性 | 0.7 N/µm | |
| Z向的刚性 | 8 N/µm | |
| 最大负载能力,底板沿水平方向 | 10 kg | |
| 最大负载能力,底板沿任意方向 | 4 kg | |
| 最大保持力,底板沿水平方向 | 100 N | |
| 最大保持力,底板沿任意方向 | 40 N | |
| 总质量 | 5.5 kg | |
| 材料 | 铝、不锈钢 | |
| 高度 | 155 mm | |
| 底板直径 | 222 mm | |
| 其他 | H-815.D6A3 | 公差 |
| 工作温度范围 | 0至50 °C | |
| 驱动器连接器 | 6个圆柱形的推拉连接器 16针 (母头) | |
| 推荐控制器/驱动器 | C-887.4x, C-887.3x |
H-815六足位移台
Technical note for unpacking the hexapod
Hexapod Systems: Hexapod H-815 with C-887.3x/.4x Controller with Integrated Drivers for BLDC Motors
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
用于工业精密应用的六足位移台;无刷直流电机;有效载荷为10kg;最大速度为20mm/s;绝对编码器。 连接电缆不包含在发货范围内,需单独订购。

