Problem solved
PI's Fast Multichannel Photonics Alignment (FMPA) solutions combine application-optimized, fab-ready, highly dynamic alignment stages with sophisticated controllers that integrate the world's most advanced and effective first-light search, profile, and power optimization alignment algorithms.
Reduction of alignment time by 99%
This award-winning technology addresses the number one cost driver for photonics test and assembly: the precise alignment required for each element and channel. Legacy alignment technologies date back to the 1980s and can take minutes to complete. PI's fast optical alignment solutions reduce the time required by typically 99%, routinely completing the task in less than one second. Studies show that up to 80% of the cost of a photonic device is attributable to alignment, without FMPA. If this 80% share of costs is reduced by 99%, the benefits to the manufacturing industry are obvious. And with projections of three orders of magnitude escalation in demand for photonic components in the near future, as new applications and devices emerge, FMPA is a true enabler.
Versatile, compact, proven solutions for 6-DoF alignment challenges
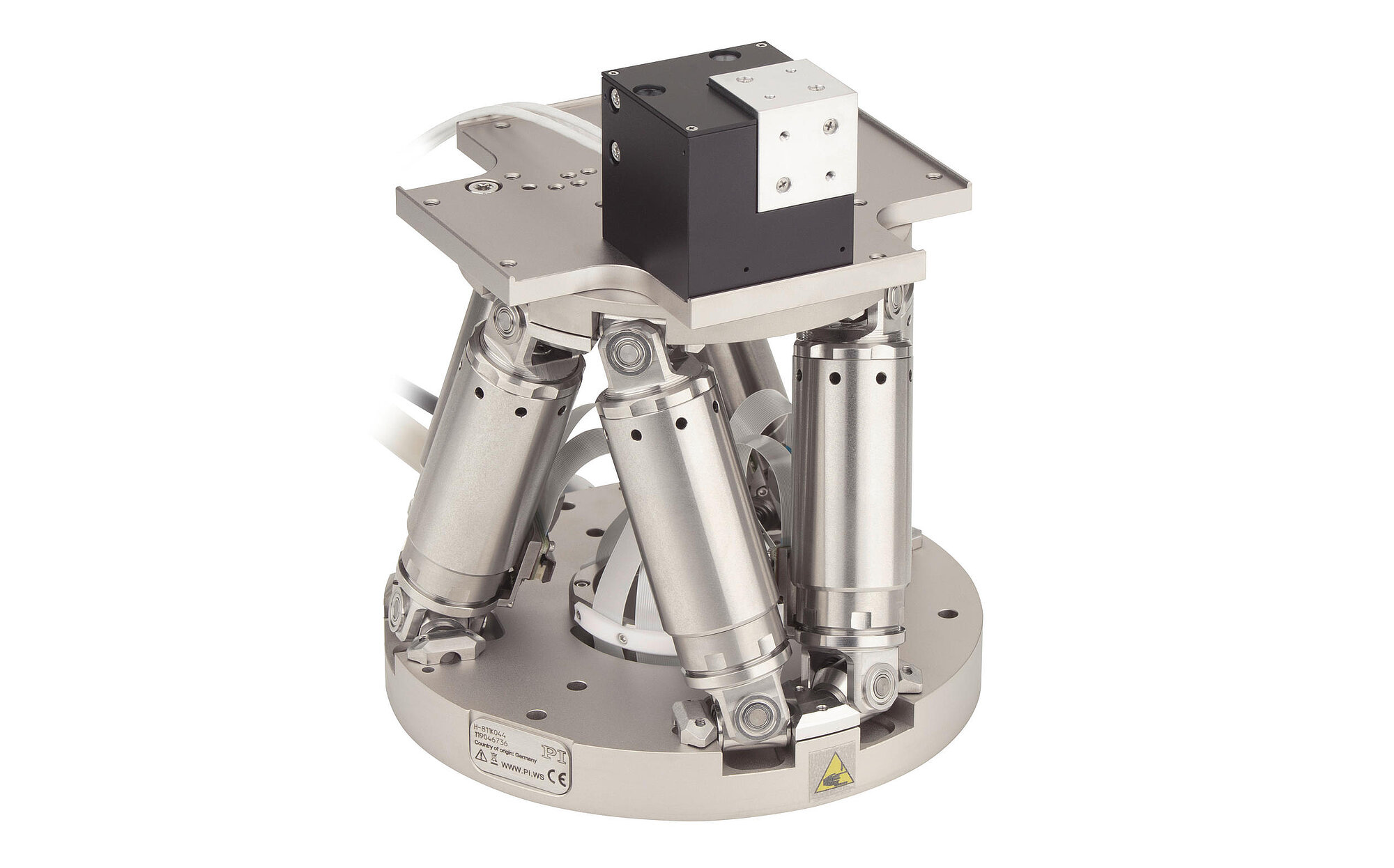
These integrated solutions combine PI's premier compact hexapod with a highly dynamic, ultra-resolution NanoCube® fast piezo scanning stage to provide 6-DOF positioning, scanning, and optimization. Since their introduction in 2016, these unique microrobotic solutions have enabled a variety of applications ranging from silicon photonics wafer probing to array alignment and automated photonics device assembly. They are the solution of choice for many leading OEMs and in-house integration teams. The applications are complex, but the reasons for the choice are simple: groundbreaking alignment speed that improves production throughput by two orders of magnitude, an easy-to-master command set complemented by broad and deep software support, and global application expertise and support.
Synergies for higher performance
The combined hexapod and NanoCube® mechanisms operate synergistically to enable simultaneous optimization across multiple channels, I/Os, and DoF, with parallel optimization across all DoF and I/Os. For example, the NanoCube® offers extreme speed and long life through flexure guides and PICMA piezo drives, while the hexapod offers generous travel that includes pitch-yaw-roll positioning and alignment optimization important for arrayed waveguides, etc. High-resolution analog inputs provide connectivity to power measurement devices, such as PI’s F-712.PM1 high-bandwidth optical power meter, for optimization and profiling, enabling efficient and fast automated fiber optical alignment. Soft limits are supported to ensure process safety.
Low profile and upright configurations
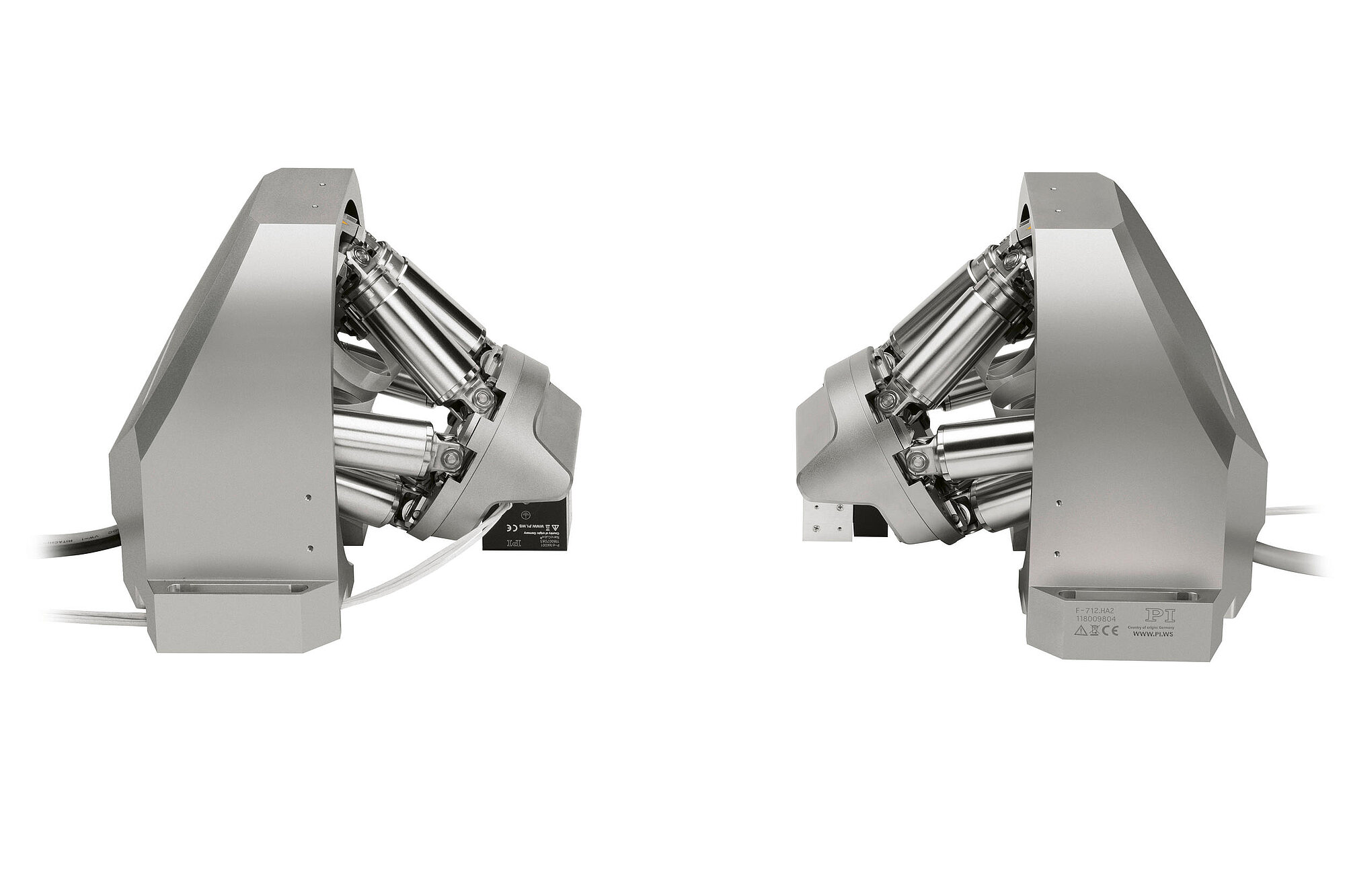
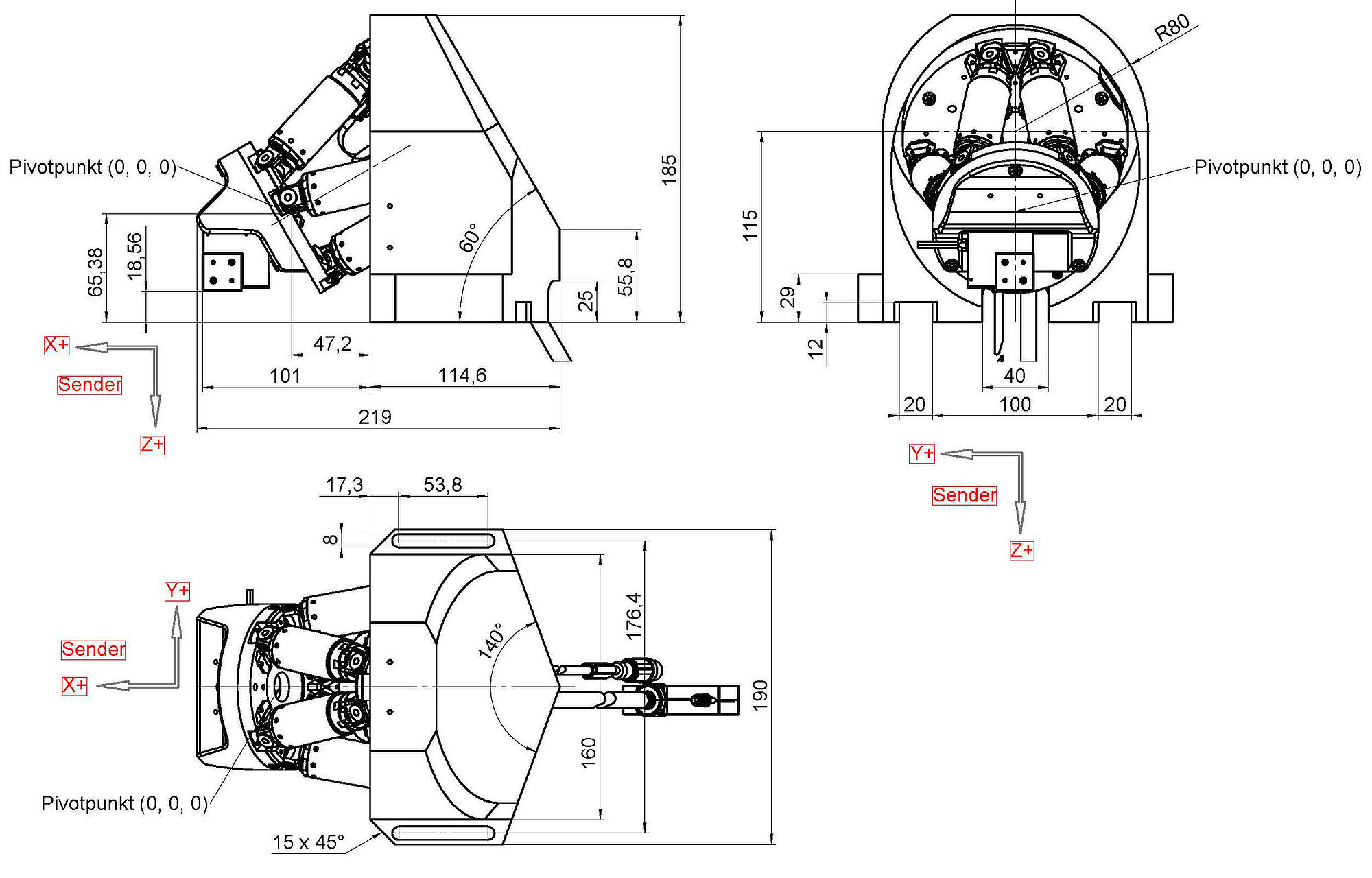
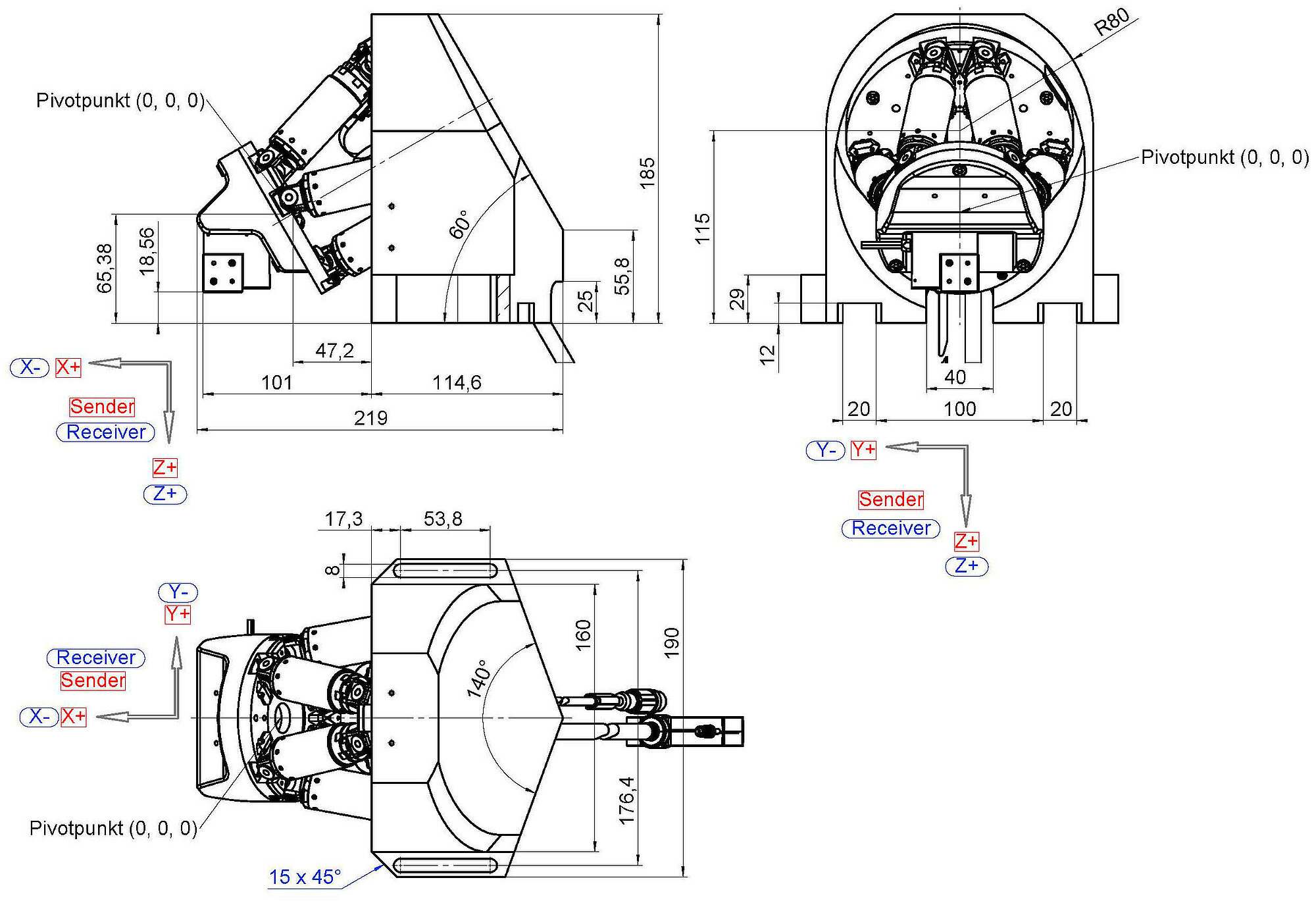
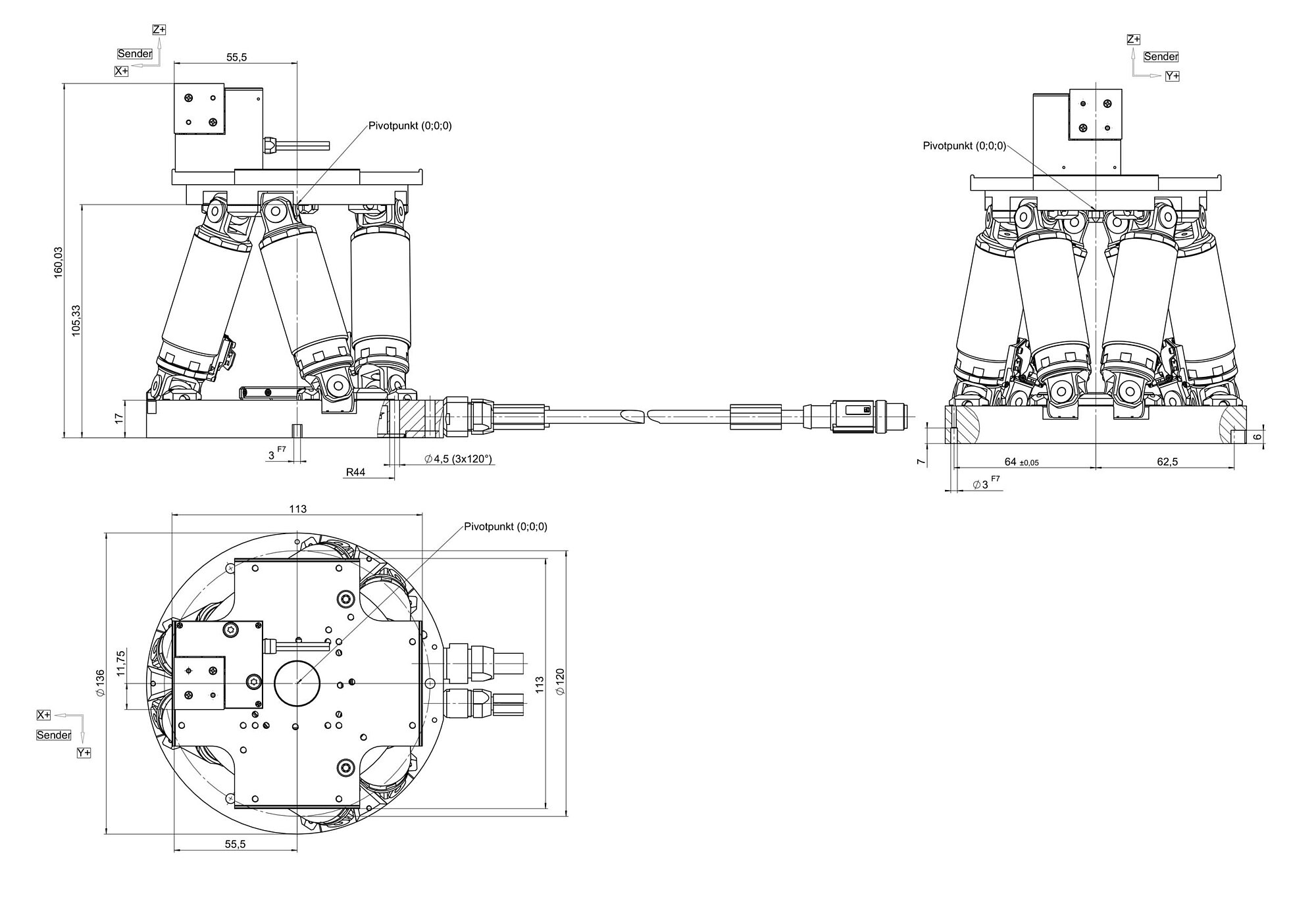
PI’s 6-DoF fiber alignment systems include the F-713.HA1, F-713.HA2, and F-713.HU1 standard configurations.
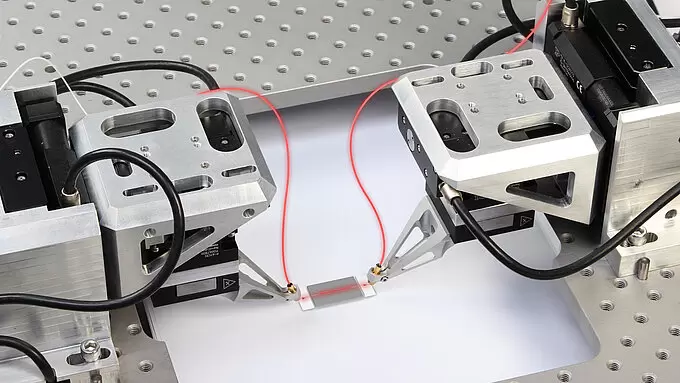
The F-713.HA1 and F-713.HA2 single-sided and double-sided angled configurations offer a low profile. This means that the alignment can be performed close to (or even under) the mounting surface thanks to the hexapod’s angled mounting. Ideal for silicon photonics wafer probing applications.
The F-713.HU1 single-sided upright configuration is ideal for device characterization and packaging processes. Upright configurations for two or even more sides are available on request.
Starting with these sophisticated platforms, it is easy to configure further alignment solutions of unprecedented speed that support functionalities such as submicron-sensitive wafer proximity automation.
Application fields
PIC production, alignment of fiber arrays, collimators, optical components or lenses, silicon photonics wafer probing, testing, assembly, and packaging of photonics and fiber optics