在运动控制软件的设计中,PI追求独立于平台和硬件的理念。这种方法的价值已经得以验证,而且它对于将来的加强也非常灵活。
GCS通过标准化的人类可读指令集确保了PI定位系统之间的兼容性。因此,启动和编程变得更加简单:可以同时操作不同的定位系统,并且能够以较少的编程工作量集成新的系统。
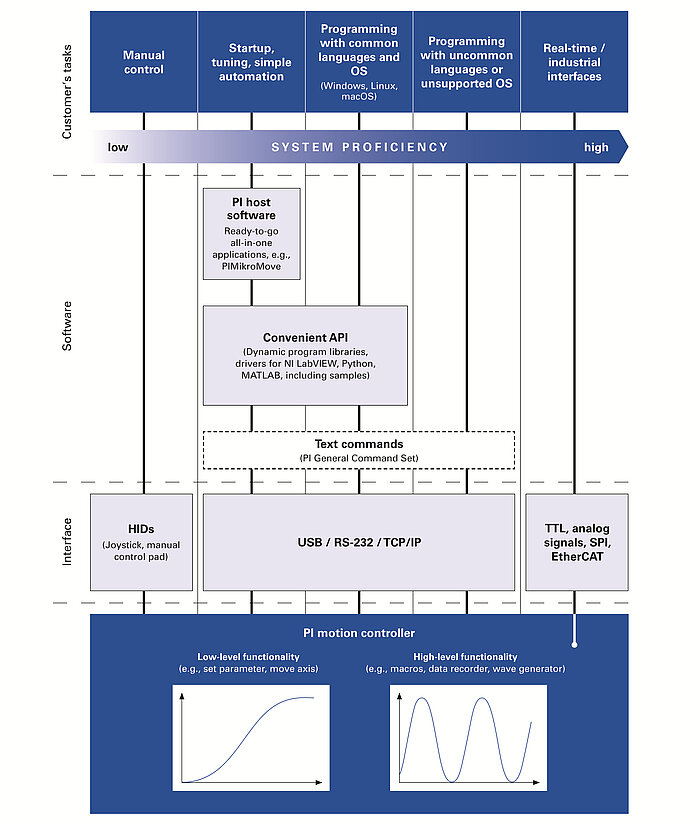
可以采用不同的方式来控制PI控制器:
额外的控制选项:
PIPython包是用于与PI控制器通信和处理GCS数据的模块集合。PIPython与Windows、Linux和OS X上的Python 3.6+相兼容。即使没有GCS DLL,它也可以与任何其他平台相兼容。
PIPython可以在GitHub上下载。
PI Software on ARM-Based Platforms
在Linux操作系统下使用PI控制器