非线性
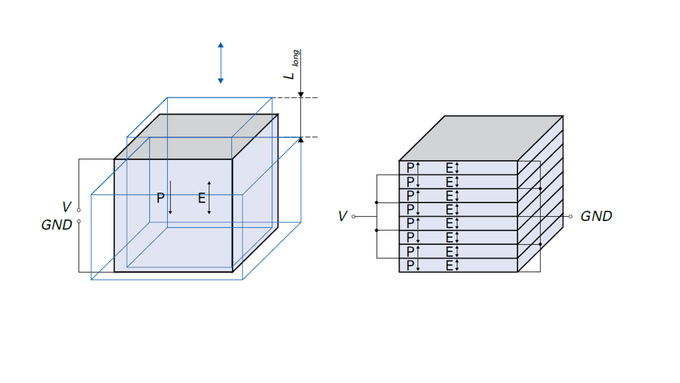
由于外部磁畴的影响,压电促动器随电压变化的位移曲线存在一个受滞后控制的强非线性过程,因而在名义位移到带特定驱动电压的中间位置之间不能进行线性插入。压电陶瓷的机电和介质大信号曲线反映了这些特点(图1)。每个图形的原点由各自的热去极化条件定义。 反向场中达到矫顽磁场强度EC时,两双极大信号曲线的形状由铁电极性反转过程决定。从介电曲线可以看出,这些换向点上呈现很大的极化反转。同时,极性反转后,由于极化和磁场强度的方向再次变得相同,收缩的陶瓷再次膨胀。这一特性使得机电曲线呈特有的蝴蝶状。电场消失后,剩余极化Prem/-Prem和剩余应变Srem依然存在。 压电促动器通常为单极驱动。由于位移信号增大的外部磁畴部分(图2),准双极运行导致更强的非线性以及滞后,同时也增大了应变幅度。 数据表中给出的是促动器在额定电压下的自由位移。

标准层高
>> PICMA Stack 60 µm
>> PICMA Bender 20 至 30 µm
>> PICA Stack/Thru 0.5 mm
>> PICA Shear 0.5 mm
>> Picoactuator 0.38 mm 组件实际可达到的自由位移还取决于另外一些因素,如机械预载、温度、控制频率、尺寸和无源材料的数量。