V-141.040A1 新产品!
Compact high-precision direct drive linear stage; ironless 3-phase linear motor; 40 mm travel range; 5 kg load capacity; 500 mm/s maximum velocity; incremental linear encoder, 100 nm sensor resolution, sin/cos, 1 V peak-peak







Product overview
V-141 direct-drive linear stages are designed for accuracy, precision, long life, ease of use, and can be mounted in any orientation. A model with integrated counterbalance is available for vertical operation.
Even though compact, V-141 linear stages offer superior travel accuracy, flatness, and performance compared to bigger stages. With a powerful, non-cogging, direct drive motor, the V-141 linear stage family performs well in production environments. The ultra-precision cross roller bearings are intended to be low maintenance for the life of the stage.
The V-141 is designed for XY and XYZ mounting. The Z model comes with a magnetic counterbalance.
Three phase motors for higher dynamics and friction-free, maintenance-free operation
The three-phase linear motors driving the V-141 stage family transfer their force directly and friction-free to the motion platform. This eliminates backlash and play that can result from mechanical components like gears and screws in the drivetrain. Ideal for high-velocity, high-acceleration applications, these motors feature a maintenance-free, frictionless design, ensuring longevity in demanding 24/7 operations. The controller's current limit settings allow easy motor disablement, preventing damage to the stage or the application.
Crossed roller bearings improve load capacity, accuracy and lifetime
Crossed roller bearings offer a superior level of smoothness, straightness, and flatness, close to air bearing performance. By replacing the point contact of ball bearings with a line contact, rollers become considerably stiffer, requiring less preload. The resulting reduction in friction enables smoother running and higher accuracy. Crossed roller bearings can also support higher vertical and moment loads. The anti-creep mechanism prevents roller drift, enhancing reliability. Cleanroom grease is applied for low-maintenance operation.
Incremental encoder
V-141 stages are equipped with incremental sin/cos linear encoders that measure position with utmost accuracy directly at the motion platform, enhancing linearity and ensuring immunity to mechanical play and elastic deformation which can result from indirect measuring methods. A home signal is built in to initiate the stage.
Choosing the right precision linear stage and motion controller
Selecting the right linear stage is pivotal for optimal performance in high-precision motion applications, such as semiconductor inspection and photonics alignment. Factors such as resolution, guiding accuracy, and repeatability must be carefully considered. These linear stages offer excellent geometric accuracy (flatness, straightness, pitch, and yaw) along with 0.125 µm bi-directional repeatability in a very compact package. With high dynamic properties, including up to 2 g acceleration and 1 m/sec velocity, these compact motorized stages are ideal for the automation of 24/7 highly accurate positioning tasks required for micro-assembly, alignment, or mass production of precision devices.
Partnered with PI’s A-8xx series motion controllers, these stages achieve unparalleled motion performance. PI’s EtherCAT-based controllers offer remarkable flexibility, facilitating the seamless integration of third-party equipment compatible with EtherCAT. Advanced algorithms in the A-8xx series motion controllers, such as PILOT allow for higher dynamics with reduced motor currents, virtually increasing the motor’s force constant. Choose the compact V-141 for precision, reliability, and efficiency in your motion applications.
Accessories and options
Controllers and cables
A-81x: ACS based controllers (2, 4 axis models, various configurations) for medium power requirements
A-82x: ACS based controllers (4, 6, 8 axis models, various configurations) for high power requirements
A-851.VA03: Cable set, V-xxx to A-8xx controllers, sin/cos encoder signals, 3 m length
Application fields
Precision micro-assembly. Research. Biotechnology. General Automation. Device assembly. Laser Micro-processing. Pick and place. Photonics Alignment and Assembly.
| Motion | V-141.040A1 | V-141.060A1 | V-141.100A1 | Tolerance |
|---|---|---|---|---|
| Active axes | X | X | X | |
| Travel range in X | 40 mm | 60 mm | 100 mm | |
| Acceleration in X, unloaded | 20 m/s² | 20 m/s² | 20 m/s² | max. |
| Maximum velocity in X, unloaded | 500 mm/s | 800 mm/s | 1000 mm/s | |
| Straightness error in Y (straightness) | ± 2 µm | ± 3 µm | ± 4 µm | max. |
| Straightness error in Z (flatness) | ± 3 µm | ± 4 µm | ± 5 µm | max. |
| Angular error around Y (pitch) | ± 150 µrad | ± 175 µrad | ± 200 µrad | max. |
| Angular error around Z (yaw) | ± 150 µrad | ± 175 µrad | ± 200 µrad | max. |
| Positioning | V-141.040A1 | V-141.060A1 | V-141.100A1 | Tolerance |
| Positioning accuracy in X, calibrated | ± 2 µm | ± 2.5 µm | ± 3 µm | max. |
| Bidirectional repeatability in X | 0.125 µm | 0.125 µm | 0.125 µm | max. |
| Reference switch | Index in the middle of the travel range, 1 V peak-peak | Index in the middle of the travel range, 1 V peak-peak | Index in the middle of the travel range, 1 V peak-peak | |
| Integrated sensor | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | |
| Sensor signal | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | |
| Sensor resolution | 100 nm | 100 nm | 100 nm | |
| Drive Properties | V-141.040A1 | V-141.060A1 | V-141.100A1 | Tolerance |
| Drive type | Ironless 3-phase linear motor | Ironless 3-phase linear motor | Ironless 3-phase linear motor | |
| Operating voltage | 48 bis 80 V | 48 bis 80 V | 48 bis 80 V | |
| Nominal current, RMS | 1.8 A | 1.8 A | 1.8 A | typ. |
| Peak current, RMS | 5 A | 5 A | 5 A | typ. |
| Drive force in X | 8 N | 8 N | 16 N | typ. |
| Peak force in X | 22 N | 22 N | 45 N | |
| Force constant | 4.5 N/A | 4.5 N/A | 9 N/A | |
| Resistance phase-phase | 4 Ω | 4 Ω | 10 Ω | typ. |
| Inductance phase-phase | 0.6 mH | 0.6 mH | 1.4 mH | |
| Back EMF phase-phase | 4.5 V·s/m | 4.5 V·s/m | 9 V·s/m | max. |
| Magnet pitch | 19.05 mm | 19.05 mm | 19.05 mm | |
| Mechanical Properties | V-141.040A1 | V-141.060A1 | V-141.100A1 | Tolerance |
| Maximum load capacity, horizontal orientation | 5 kg | 5 kg | 5 kg | |
| Moved mass in X, unloaded | 320 g | 450 g | 650 g | |
| Bearing type | Crossed roller bearings | Crossed roller bearings | Crossed roller bearings | |
| Overall mass | 600 g | 800 g | 1100 g | |
| Material | Aluminum | Aluminum | Aluminum | |
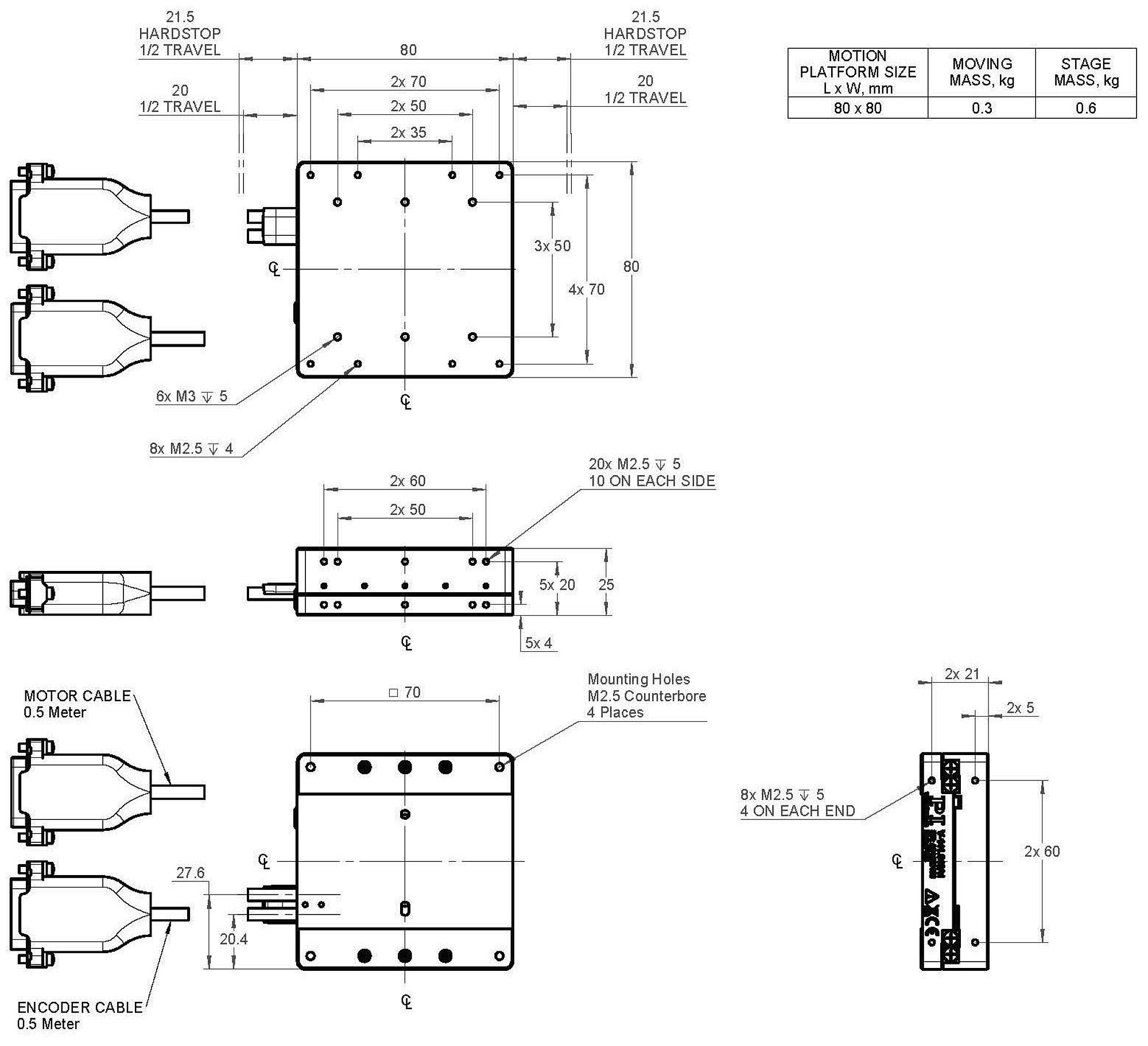
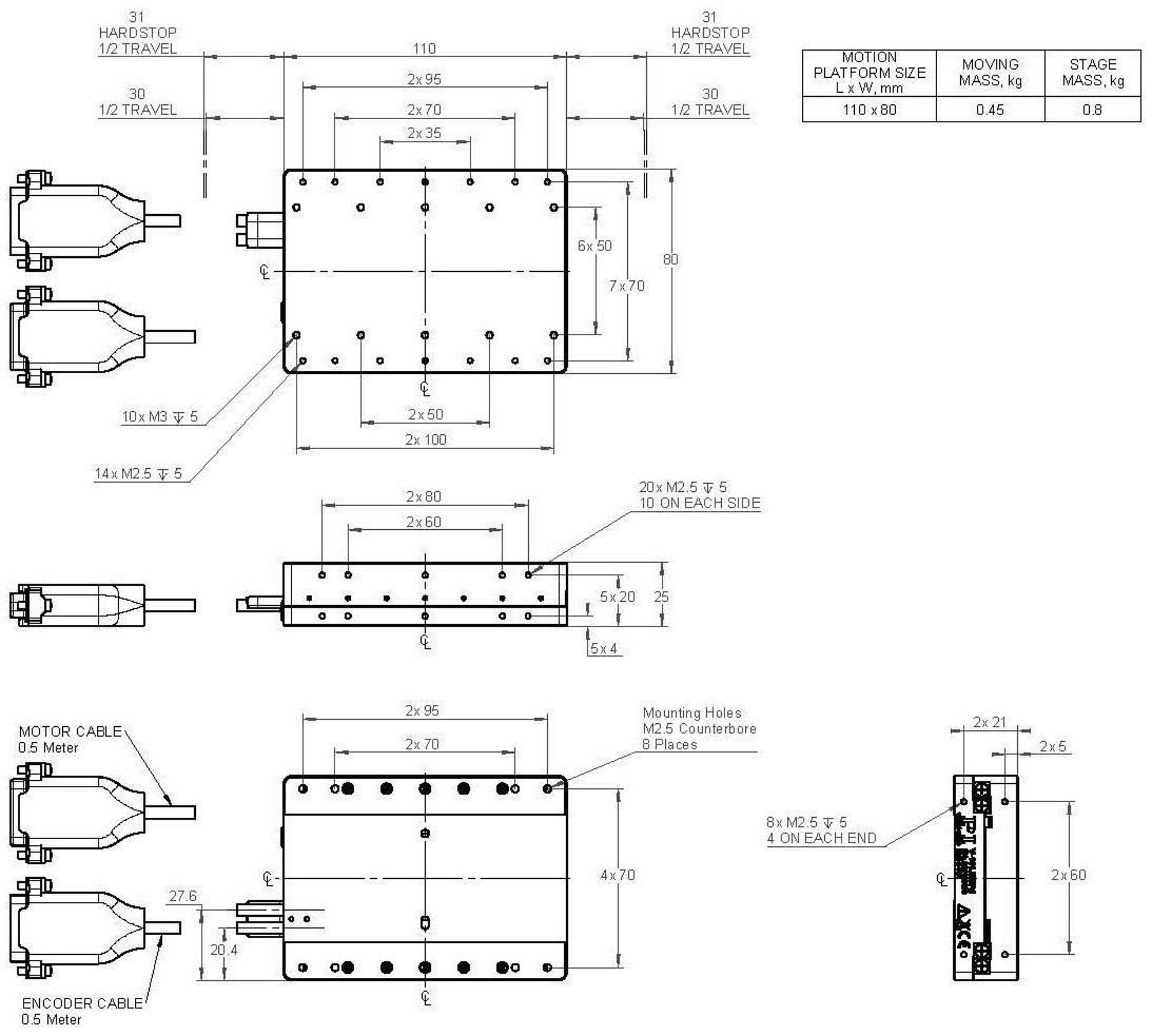
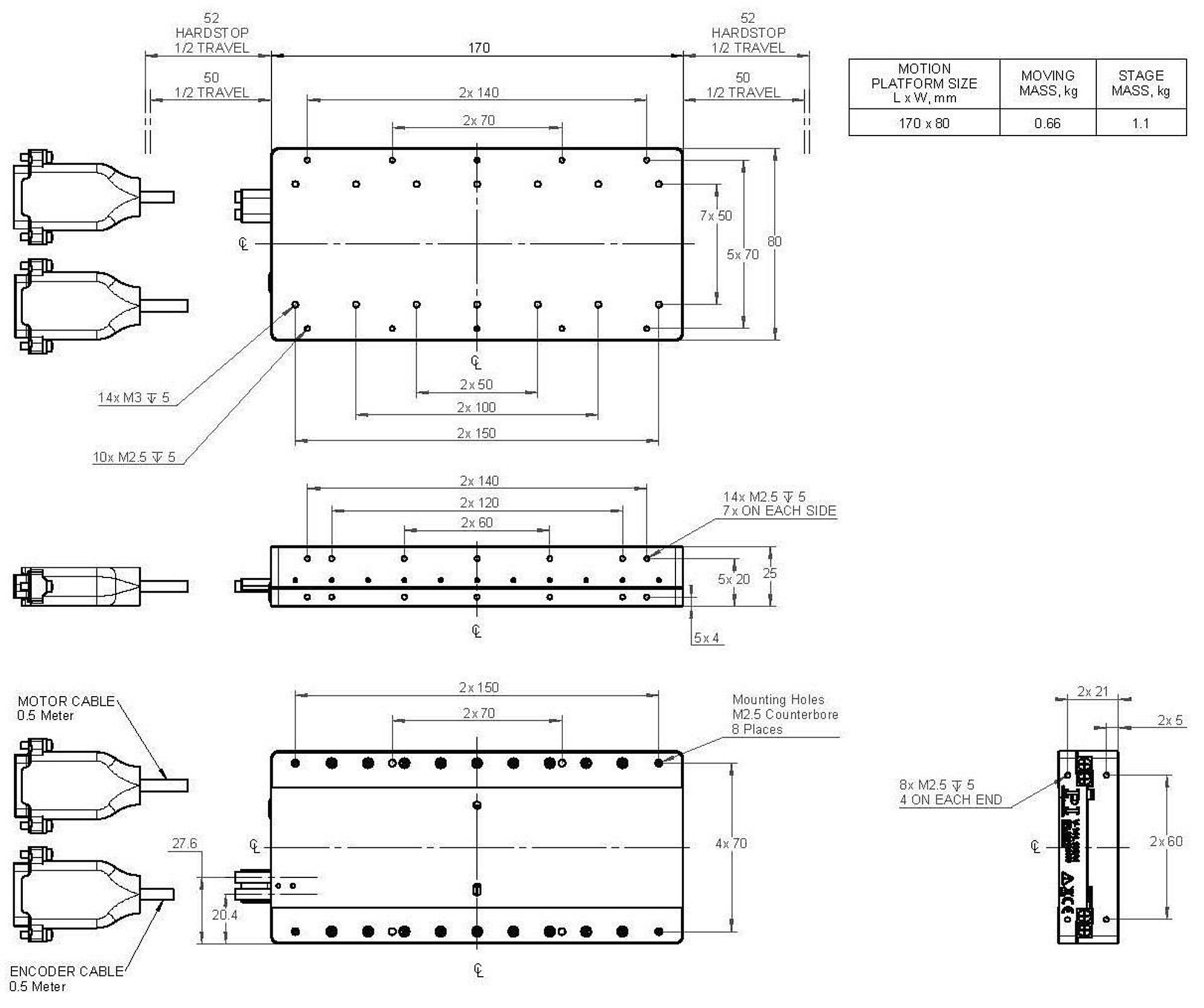
| Motion platform dimensions | 80 × 80 mm | 110 × 80 mm | 170 × 80 mm | |
| Height | 25 mm | 25 mm | 25 mm | |
| Miscellaneous | V-141.040A1 | V-141.060A1 | V-141.100A1 | Tolerance |
| Operating temperature range | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | |
| Connector | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | |
| Recommended controllers/drivers | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
Note on straightness and angular errors: Dependent on the quality of the mounting surface, the payload, orientation, and external forces that act on the stage. Please contact PI for application-specific parameters. The specified values are static (no rotary motion during measuring) and without load.
Note on velocity, acceleration, and permissible payload: Can be limited by imbalance of the payload or the controller and the drive.
Note on the velocity of V-141.100A1: To reach the maximum velocity an operating voltage of at least 72 V is required.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Compact high-precision direct drive linear stage; ironless 3-phase linear motor; 40 mm travel range; 5 kg load capacity; 500 mm/s maximum velocity; incremental linear encoder, 100 nm sensor resolution, sin/cos, 1 V peak-peak
Compact high-precision direct drive linear stage; ironless 3-phase linear motor; 60 mm travel range; 5 kg load capacity; 800 mm/s maximum velocity; incremental linear encoder, 100 nm sensor resolution, sin/cos, 1 V peak-peak
Compact high-precision direct drive linear stage; ironless 3-phase linear motor; 100 mm travel range; 5 kg load capacity; 1000 mm/s maximum velocity; incremental linear encoder, 100 nm sensor resolution, sin/cos, 1 V peak-peak

