PI六足位移台(Stewart平台)控制器可实现高精度运动和定位,在严苛的工业与研究环境中提供可靠的精密性能。 我们先进的并联运动六足位移台控制器能够以亚微米至纳米级的运动分辨率协调六个自由度的运动,在传统串联运动位移台难以胜任的场合,可实现精密的对准、扫描和操作。 每款运动控制器均经过精心设计,可与PI六足位移台无缝集成,实时自动执行坐标变换和多轴路径规划。 集成模型可解算高级运动学,稳健的对准与调试功能则能使用户在复杂的运动轨迹中获得一致、可重复的结果。 无论您是需要以平稳、恒定的速度进行高负载定位,还是使用我们的直驱六足位移台进行高速运动仿真,PI六足位移台控制器都能提供稳定、可靠的性能。
六足位移台如何工作?
六足位移台利用并联运动机械学原理,即六个促动器协同工作,在X、Y、Z、俯仰、旋转和偏转方向上产生平稳、协调的运动。 这种架构可减少累积误差,降低运动质量(惯性),并增强刚性,从而直接提高精度和动态响应能力,对晶圆定位、光学零部件校准、微装配和计量至关重要。 PI第四代六足位移台控制器是专为特定需求打造的设备,依托40年来六足位移台自主设计与研发的经验积累,能够使六足位移台在不同应用场景下均保持良好的运行性能。
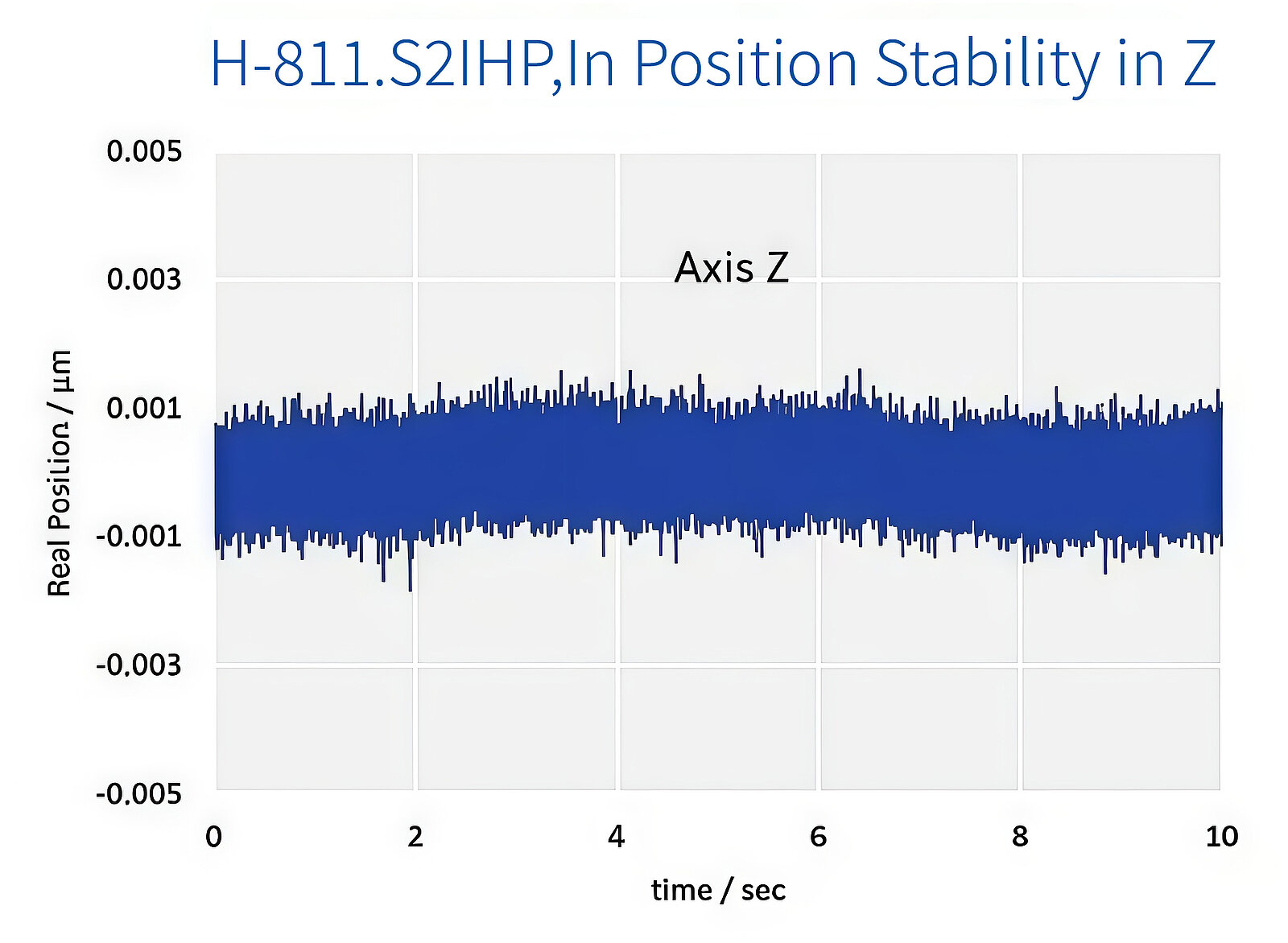
PI六足位移台和控制器通过结合高分辨率编码器、基于模型的运动学以及针对机械结构调整的前馈/反馈控制回路,实现了亚微米级的精度。 矢量运动控制可协调多轴沿笛卡尔空间中的既定路径移动,从而提高路径精度,减少复杂扫描中的跨轴耦合,而实时轨迹规划则能使所有轴同步运动。
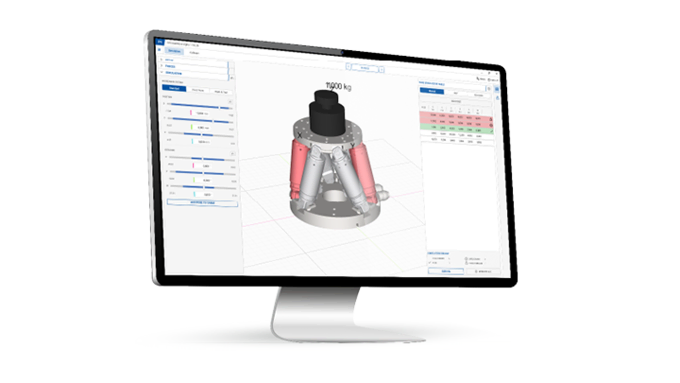
六足位移台控制与仿真软件

六足位移台控制软件能够自动进行六足位移台参数化,可视化所有促动器的位置,并执行宏程序。 系统提供数据记录器,用于分析系统行为。
仿真软件使客户能够在收到硬件前,模拟运动并测试不同的用例。
相比于外部软件驱动的系统,专用的集成扫描和对准程序在先进的光学和光子学对准应用中,可显著提高吞吐量和性能。

即用型程序扩展功能: 内置的光学和光子学扫描与对准程序可简化光纤对准和透镜定心等任务。 高带宽模拟输入(配合高速光功率计使用时尤为重要)帮助用户运行螺旋和光栅扫描,以进行设备表征,并同步采集功率和位置数据。
所有这些程序均可通过PI的六足位移台控制软件进行调用,使工厂和研究实验室能够轻松实现六足位移台的自动化控制。
通过PI的软件工具以及适用于Python、C/C++、LabVIEW和MATLAB的API,加上TCP/IP和实时EtherCAT选项,集成过程得以简化。 其功能包括维护时用的嵌入式诊断和健康监测,以及在手动点动和自动程序之间无缝切换且不丢失寄存信息,适合精密制造领域的六足位移台应用。
详细规格与技术参数

PI为紧凑型、中等负载和高负载六足位移台提供标准和定制的控制器。 核心规格包括纳米级命令分辨率、数千赫兹的伺服更新率,以及带有矢量运动控制的协调6自由度轨迹控制,以获得准确的路径跟踪。 系统级的线性和角度精度通过出厂校准进行验证,使每对六足位移台和运动控制器均能达到技术文档中所标明的性能。
除了六个六足位移台轴的协调输出外,标准运动控制器还提供两个附加轴,可用于操作旋转位移台、线性位移台或线性促动器。

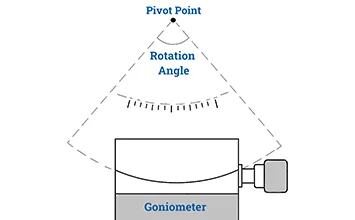
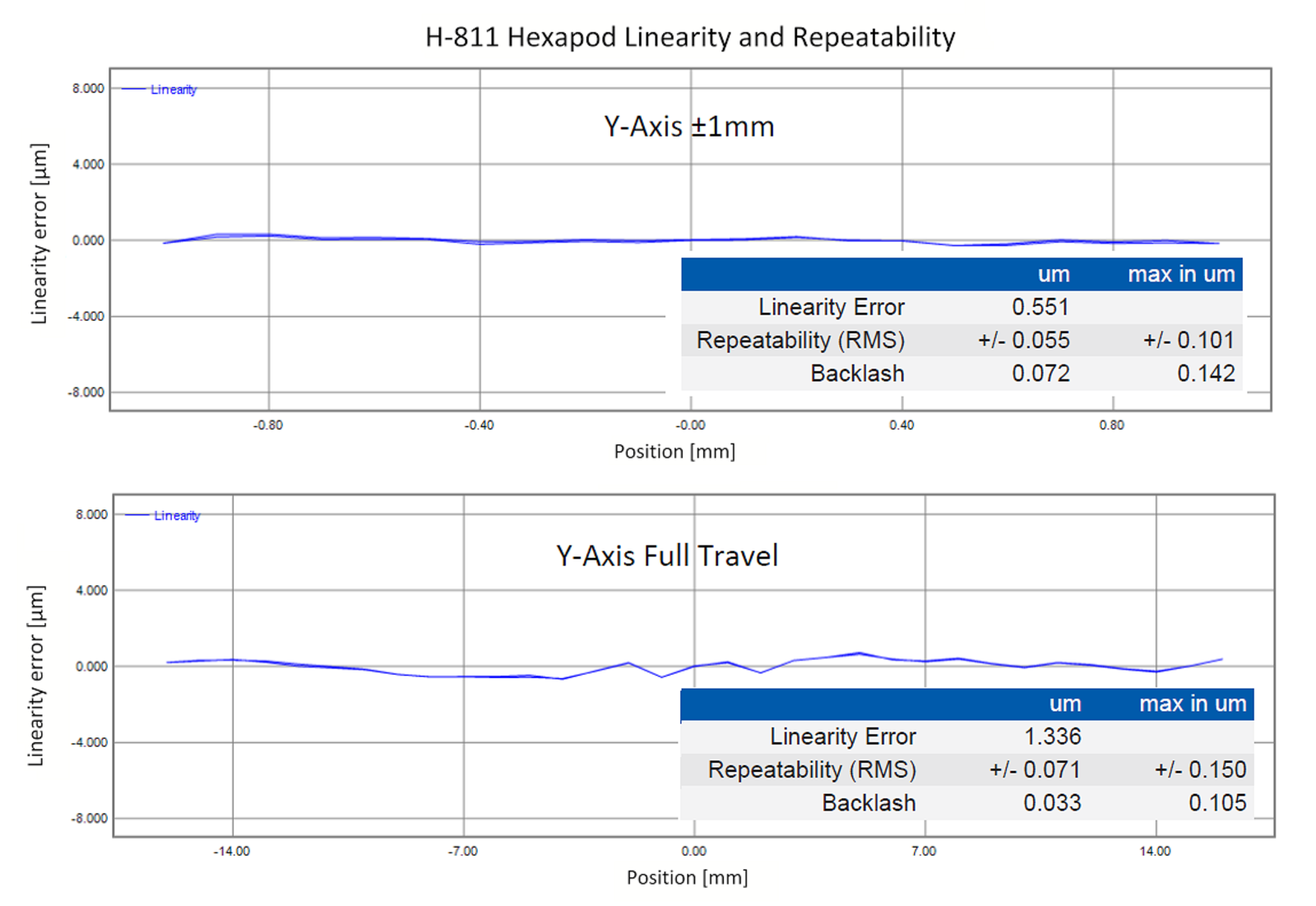
性能指标因型号和应用而异:负载能力从微型光学级有效载荷到重型仪器不等;线性轴的重复精度达到亚微米级,角度轴达到角秒级;行程范围在精度和工作区要求之间取得平衡。 可编程枢轴点可确保围绕用户自定义中心进行一致的旋转,对精密光学和光子学对准至关重要。 这些功能由先进的六足位移台控制器和直观的六足位移台控制软件共同提供支持。

具备工业级耐用性。 控制器具有强大的热管理功能、抗电磁干扰设计以及冗余安全功能(软限位、看门狗、故障处理)。 六足位移台可选配绝对测量编码器和集成式制动器,能在半导体工厂和精密光学生产等全天候运行环境中安全可靠、性能稳定。
常见问题
PI六足位移台和控制器如何实现高精度运动?
它们将并联运动机械学与高分辨率反馈、实时逆运动学、矢量运动控制和精密调谐的控制回路相结合。 可编程枢轴点可使其绕设定中心准确旋转,从而提高精度、缩短对准时间。
哪些因素会影响六足位移台的性能?
关键因素包括动力传动系统、接头、机械刚性和促动器线性度的机械设计,编码器类型和分辨率,控制回路带宽和调谐,环境稳定性(温度、振动),有效载荷质量和重心,布线和接地,以及所生成轨迹的质量。 若要通过运动控制器和六足位移台达到指定的精度和重复精度,正确的集成、校准和特定应用配置(包括使用特定的六足位移台控制软件)至关重要。
更多六足位移台常见问题