C-887.5220
用于六足位移台的六轴控制器,TCP/IP,RS-232,台式设备,包含对两个附加轴的控制,运动停止

C-887.5330
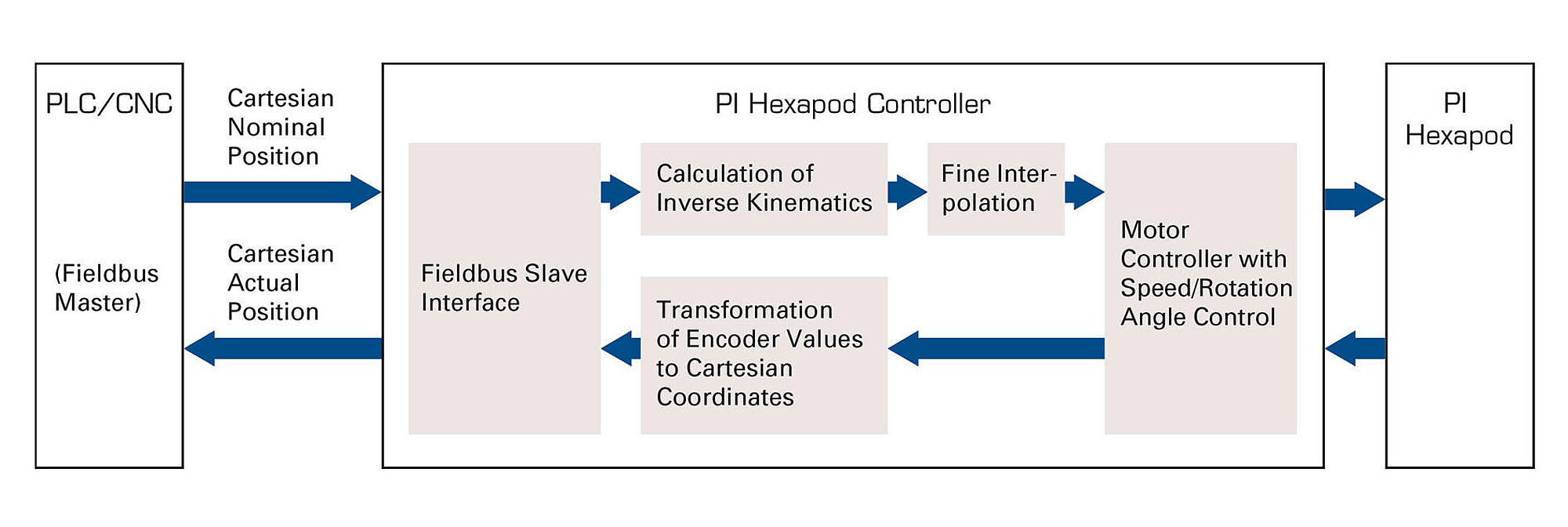
将六足位移台运动控制器集成到自动化系统中
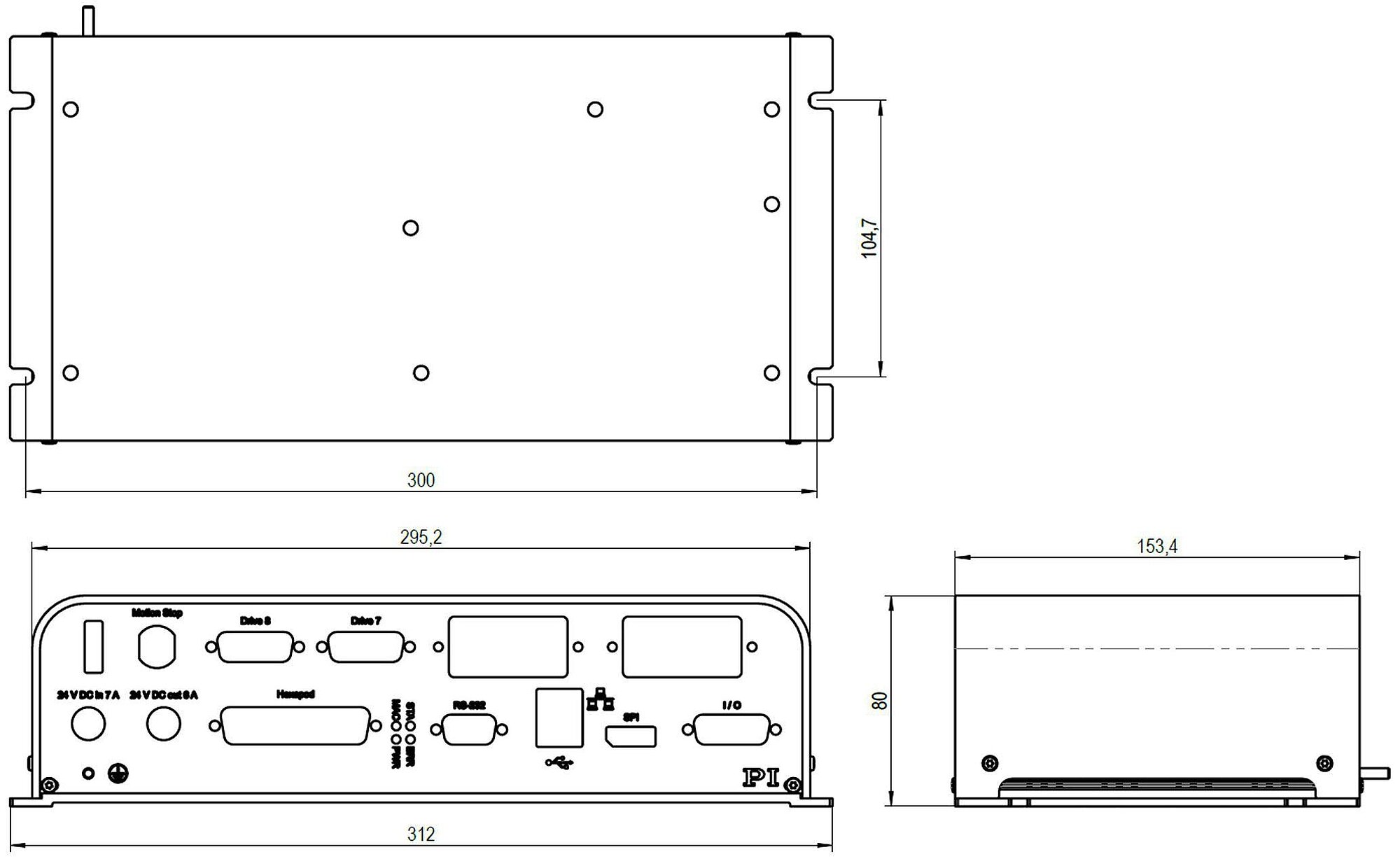
C-887.5x0,尺寸单位为mm

C-887.5230




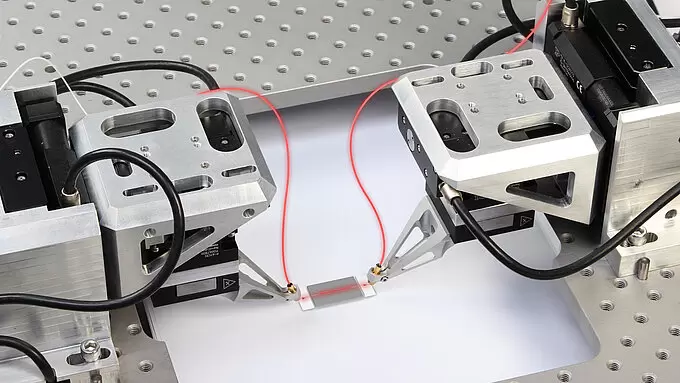
用于六轴并联运动的控制器
用于控制六足位移台(六轴并联运动)的高性能控制器。 由于控制器仅提供控制信号,而电机驱动器位于六足位移台或独立的驱动器盒中,因此支持多种驱动器类型。 该控制器支持PI目前提供的标准六足位移台及定制并联机构。 此外,还可控制另外两个单轴的电机驱动器。
功能
位置以直角坐标输入,控制器据此计算并联机构的控制。 为了简化六足位移台的集成,坐标系统(Work, Tool)可改变。 旋转中心可在空间中自由定义。 数据记录器可以记录工作数据,例如电机控制、速度、位置或位置误差。 在控制器上执行宏和Python脚本可实现独立运行。 外部开关(如运动停止按键)可用于启用/禁用六足位移台的24V输出。
接口
搭配GCS 2.0指令集,用于PI定位系统:
根据版本不同:
广泛软件支持
通过基于GCS的接口进行控制。 例如,PIMikroMove用户软件可将快速对准程序以图形方式直观显示。 提供丰富的驱动程序,例如适用于C、C++、C#、NI LabVIEW、MATLAB和Python。 PIHexapodEmulator可在无硬件条件下实现虚拟启动和操作。
供货范围
发货范围包括控制器、软件包以及用于供电的电源适配器。 建议将六足位移台机械本体和合适的成套电缆与控制器一同订购,以使各零部件相互适配。 PLC主控制器不包含在发货范围内。
| 基础 | C-887.5220 | C-887.5230 | C-887.5330 | |
|---|---|---|---|---|
| 轴 | 6 | 6 | 6 | |
| 额外的轴 | 2个单轴 | 2个单轴 | 2个单轴 | |
| 处理器 | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | 英特尔原子双核(1.8GHz) | |
| 与应用相关的功能 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | 控制器宏指令GCS ǀ 控制器宏指令PIPython ǀ 启动宏 ǀ 数据记录器 ǀ 快速对准 | |
| 保护功能 | 通过外部开关切断 ǀ 出现错误时关闭伺服模式 | 通过外部开关切断 ǀ 出现错误时关闭伺服模式 | 通过外部开关切断 ǀ 出现错误时关闭伺服模式 | |
| 配置管理 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | |
| 受支持的ID芯片 | ID芯片2.0 | ID芯片2.0 | ID芯片2.0 | |
| 运动和控制 | C-887.5220 | C-887.5230 | C-887.5330 | |
| 受支持的传感器信号 | A/B正交,RS-422 ǀ BiSS-C | A/B正交,RS-422 ǀ BiSS-C | A/B正交,RS-422 ǀ BiSS-C | |
| 控制变量 | 位置 | 位置 | 位置 | |
| 最大控制频率(伺服周期) | 10000 Hz | 10000 Hz | 10000 Hz | |
| 运动类型 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | 带曲线生成器的点对点运动 ǀ 目标位置循环传送 ǀ 区域扫描程序 ǀ 梯度搜索程序 ǀ 波形发生器 | |
| 运动协调 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | 协调的多轴运动 ǀ 用户定义的坐标系 ǀ 工件和刀具坐标系 | |
| 参考点开关输入 | TTL | TTL | TTL | |
| 限位开关输入 | TTL | TTL | TTL | |
| 接口和操作 | C-887.5220 | C-887.5230 | C-887.5330 | |
| 通信接口 | RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | EtherCAT从控制器 ǀ RS-232 ǀ TCP/IP ǀ USB(仅用于手动控制单元) | |
| 启/停开关 | 硬件开关开/关 | 硬件开关开/关 | 硬件开关开/关 | |
| 显示器和指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | 状态指示灯 ǀ 错误指示灯 ǀ 电源指示灯 ǀ 宏指示灯 | |
| 手动控制 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | 带USB接口的手动控制单元 | |
| 指令集 | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| 用户软件 | PIMikroMove | PIMikroMove | PIMikroMove | |
| 应用程序编程接口 | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| 模拟输入 | 4 | 6 | 6 | |
| 模拟输入信号 | 4路-10V至+10V,12位 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | 2路-5V至+5V模拟输入,16位,带宽5kHz ǀ 4路-10V至+10V模拟输入,12位 | |
| 数字输入 | 4 | 4 | 4 | |
| 数字输入信号 | TTL | TTL | TTL | |
| 数字输出 | 4 | 4 | 4 | |
| 数字输出信号 | TTL | TTL | TTL | |
| 工业Ethernet协议 | — | — | EtherCAT | |
| EtherCAT设备类别 | — | — | EtherCAT从控制器 | |
| EtherCAT通信协议 | — | — | EtherCAT上的CAN应用协议(CoE) | |
| 为EtherCAT实施的驱动曲线 | — | — | CiA402驱动曲线(IEC 61800-7-201) | |
| 根据CiA402标准,受支持的工作模式 | — | — | 回零模式 ǀ 周期性同步位置模式(CSP) ǀ 用于激活坐标系的安全基本状态(无模式变化/未选择模式) | |
| EtherCAT周期时间 | — | — | ≥1 ms | |
| EtherCAT同步模式 | — | — | 分布式时钟(DC) ǀ 与SYNC0事件同步 | |
| 电气性能 | C-887.5220 | C-887.5230 | C-887.5330 | |
| 输出电压 | 24 V | 24 V | 24 V | |
| 峰值输出电流 | 6000 mA | 6000 mA | 6000 mA | |
| 其他 | C-887.5220 | C-887.5230 | C-887.5330 | |
| 连接器六足位移台电源 | M12 4孔(母头) | M12 4孔(母头) | M12 4孔(母头) | |
| 连接器六足位移台数据传输 | HD D-sub 78(母头) | HD D-sub 78(母头) | HD D-sub 78(母头) | |
| 连接器附加轴 | D-sub 15(母头) | D-sub 15(母头) | D-sub 15(母头) | |
| 连接器模拟输入 | HD D-sub 26针(母头) | BNC ǀ HD D-sub 26针(母头) | BNC ǀ HD D-sub 26针(母头) | |
| 连接器数字输入 | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | |
| 连接器数字输出 | HD D-sub 26(母头) | HD D-sub 26(母头) | HD D-sub 26(母头) | |
| 连接器运动停止按键 | M12 8孔(母头) | M12 8孔(母头) | M12 8孔(母头) | |
| 连接器TCP/IP | RJ45插座,8P8C | RJ45插座,8P8C | RJ45插座,8P8C | |
| 连接器RS-232 | D-sub 9(公头) | D-sub 9(公头) | D-sub 9(公头) | |
| 电源电压连接器 | M12 4针(公头) | M12 4针(公头) | M12 4针(公头) | |
| 工作电压 | 24 V | 24 V | 24 V | |
| 电源适配器 | 含在发货范围内 ǀ 电源适配器24V DC | 含在发货范围内 ǀ 电源适配器24V DC | 含在发货范围内 ǀ 电源适配器24V DC | |
| 最大电流消耗 | 7 A | 7 A | 7 A | |
| 工作温度范围 | 5至40 °C | 5至40 °C | 5至40 °C | |
| 总质量 | 2800 g | 2800 g | 2800 g | |
| 连接器EtherCAT | — | — | RJ45插座,8P8C |
PI提供的多种六足位移台型号支持12V供电,这在某些应用中非常有用。 如果在此情况下,六足位移台也由控制器供电,则可以使用合适的12V电源适配器来操作控制器。 详情请咨询。
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2手动控制单元
EtherCAT Interface of C-887 Hexapod Controllers
六足位移台的运动。空间中的位置和方向,旋转中心。
六足位移台微型机器人坐标系统说明
Description of PIHexapodEmulator software
C-887 Hexapod Controller, Models C-887.5220, C-887.5230, C-887.5330
Fast Multi-Channel Photonics Alignment of Silicon Photonics Components with F-713 Alignment Systems and Hexapods from PI. PILightning Option for First Light Search
Implementing a C-887 PI Controller in TwinCAT 3.1
Updating PI Software with PIUpdateFinder
GCS阵列数据格式
PIMikroMove
PIStages3数据库的信息。将PIStages2转换成PIStages3时必须考虑的事项。
PIPython - 使用Python编程PI控制器
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
PIVirtualMove. Simulation program for parallel-kinematic multi-axis systems
Updating controller firmware with PIFirmwareManager
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
用于六足位移台的六轴控制器,TCP/IP,RS-232,台式设备,包含对两个附加轴的控制,运动停止
用于六足位移台的六轴控制器,TCP/IP,RS-232,台式设备,包含对两个附加轴的控制,运动停止,模拟输入
用于六足位移台的六轴控制器,TCP/IP,RS-232,台式设备,包含对两个附加轴的控制,EtherCAT接口,运动停止,模拟输入