H-824.D2
紧凑型六足位移台;直接驱动;负载5kg;最大速度25mm/s;D-sub连接器。 连接电缆不包含在发货范围内,需单独订购。

水平安装时H-824.D2上的最大负载

垂直安装时H-824.D2上的最大负载

以最不利角度安装时H-824.D2上的最大负载

水平安装时作用于H-824.D2的最大允许力

水平安装时H-811.G2上的最大负载

垂直安装时H-824.G2上的最大负载

以最不利角度安装时H-824.G2上的最大负载

水平安装时作用于H-824.G2的最大允许力
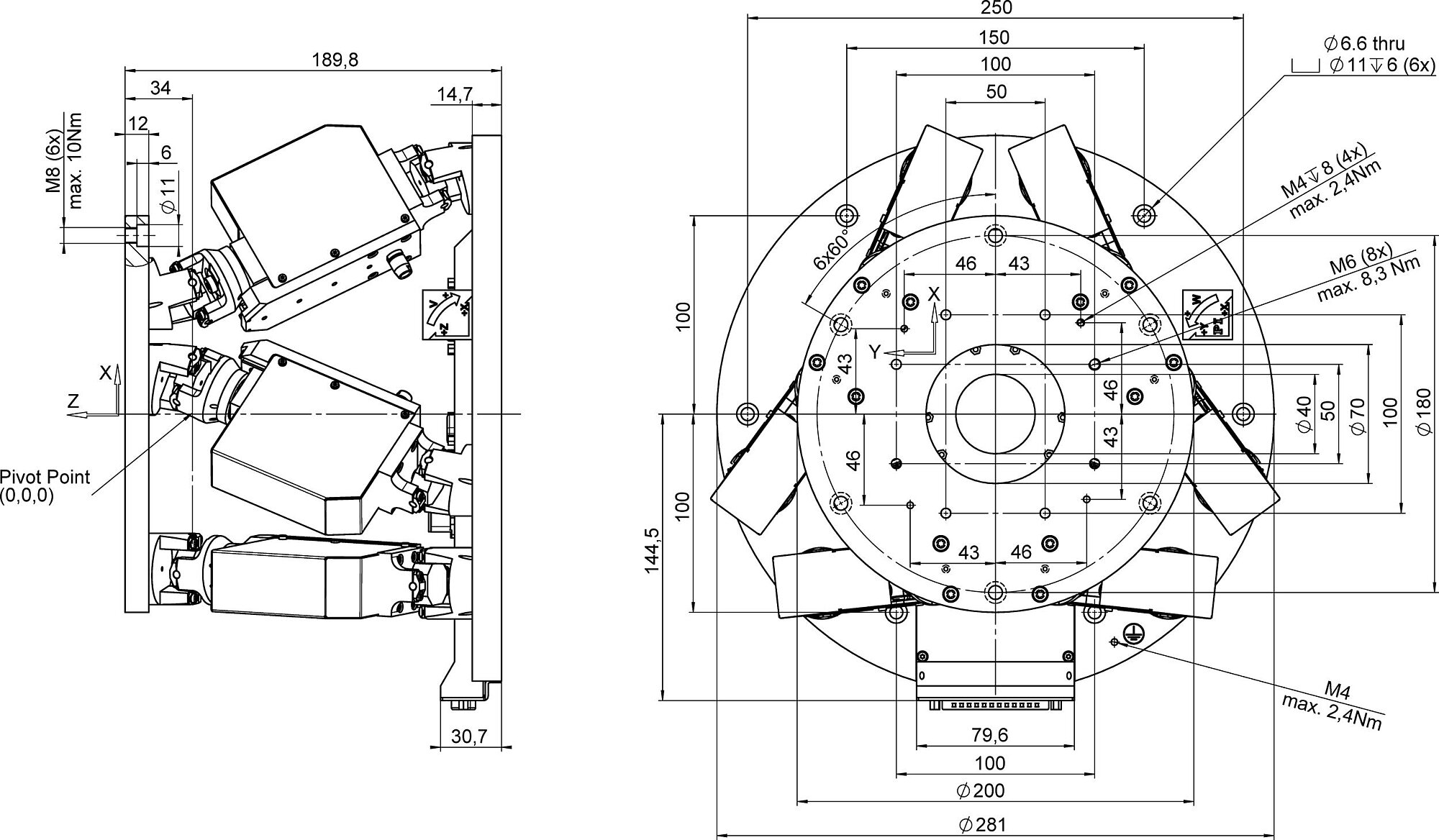
H-824,尺寸单位为毫米,位于标称行程的零位










| 运动 | H-824.D2 | H-824.G2 | 公差 |
|---|---|---|---|
| 主动轴 | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| X向的行程 | ± 22.5 mm | ± 22.5 mm | |
| Y向的行程 | ± 22.5 mm | ± 22.5 mm | |
| Z向的行程 | ± 12.5 mm | ± 12.5 mm | |
| θX向的旋转范围 | ± 7.5 ° | ± 7.5 ° | |
| θY向的旋转范围 | ± 7.5 ° | ± 7.5 ° | |
| θZ向的旋转范围 | ± 12.5 ° | ± 12.5 ° | |
| X向的最大速度 | 25 mm/s | 1 mm/s | |
| 推荐速度(X) | 10 mm/s | 0.5 mm/s | |
| Y向的最大速度 | 25 mm/s | 1 mm/s | |
| 推荐速度(Y) | 10 mm/s | 0.5 mm/s | |
| Z向的最大速度 | 25 mm/s | 1 mm/s | |
| 推荐速度(Z) | 10 mm/s | 0.5 mm/s | |
| θX向的最大角速度 | 270 mrad/s | 11 mrad/s | |
| 推荐角速度(θX) | 55 mrad/s | 5.5 mrad/s | |
| θY向的最大角速度 | 270 mrad/s | 11 mrad/s | |
| 推荐角速度(θY) | 55 mrad/s | 5.5 mrad/s | |
| θZ向的最大角速度 | 270 mrad/s | 11 mrad/s | |
| 推荐角速度(θZ) | 55 mrad/s | 5.5 mrad/s | |
| 定位 | H-824.D2 | H-824.G2 | 公差 |
| X向的最小位移 | 2 µm | 0.3 µm | typ. |
| Y向的最小位移 | 2 µm | 0.3 µm | typ. |
| Z向的最小位移 | 1 µm | 0.3 µm | typ. |
| θX向的最小位移 | 12 µrad | 3.5 µrad | typ. |
| θY向的最小位移 | 12 µrad | 3.5 µrad | typ. |
| θZ向的最小位移 | 14 µrad | 3.5 µrad | typ. |
| X向的单向重复精度 | ± 0.5 µm | ± 0.25 µm | typ. |
| Y向的单向重复精度 | ± 0.5 µm | ± 0.25 µm | typ. |
| Z向的单向重复精度 | ± 0.15 µm | ± 0.1 µm | typ. |
| θX向的单向重复精度 | ± 3 µrad | ± 2 µrad | typ. |
| θY向的单向重复精度 | ± 3 µrad | ± 2 µrad | typ. |
| θZ向的单向重复精度 | ± 2.5 µrad | ± 2 µrad | typ. |
| X向的空回 | 1.5 µm | 2 µm | typ. |
| Y向的空回 | 1.5 µm | 2 µm | typ. |
| Z向的空回 | 1 µm | 0.7 µm | typ. |
| θX向的空回 | 15 µrad | 14 µrad | typ. |
| θY向的空回 | 15 µrad | 14 µrad | typ. |
| θZ向的空回 | 30 µrad | 17 µrad | typ. |
| 驱动性能 | H-824.D2 | H-824.G2 | 公差 |
| 驱动类型 | 直流电机 | 直流齿轮电机 | |
| 标称电压 | 24 V | 24 V | |
| 机械性能 | H-824.D2 | H-824.G2 | 公差 |
| X向的刚性 | 1.7 N/µm | 1.7 N/µm | |
| Y向的刚性 | 1.7 N/µm | 1.7 N/µm | |
| Z向的刚性 | 7 N/µm | 7 N/µm | |
| 最大负载能力,底板沿水平方向 | 5 kg | 10 kg | |
| 最大负载能力,底板沿任意方向 | 2.5 kg | 5 kg | |
| 最大保持力,底板沿水平方向 | 15 N | 100 N | |
| 最大保持力,底板沿任意方向 | 5 N | 50 N | |
| 总质量 | 8 kg | 8 kg | |
| 材料 | 铝 | 铝 | |
| 其他 | H-824.D2 | H-824.G2 | 公差 |
| 工作温度范围 | -10至50 °C | -10至50 °C | |
| 数据传输连接器 | HD D-sub 78(公头) | HD D-sub 78(公头) | |
| 电源电压连接器 | M12 4针(公头) | M12 4针(公头) | |
| 推荐控制器/驱动器 | C-887.5x | C-887.5x |
连接电缆不包含在发货范围内,需单独订购。
咨询定制版本。
测量定位的规格时,使用典型速度。数据以测量报告的形式包含在产品交付中,并存储在PI中。
各个坐标(X、Y、Z、θX、θY、θZ)的最大行程范围是相互依存的。当所有其他轴都处于标称行程范围的零位置并且使用默认坐标系时,或者更确切地说,当旋转中心点设置为0,0,0时,每个轴的数据显示其最大行程范围。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
H-824六足位移台微型机器人
Technical note for unpacking the hexapod
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
紧凑型六足位移台;直接驱动;负载5kg;最大速度25mm/s;D-sub连接器。 连接电缆不包含在发货范围内,需单独订购。
紧凑型六足位移台;减速齿轮;负载10kg;最大速度1mm/s;D-sub连接器。 连接电缆不包含在发货范围内,需单独订购。















