H-810.I2
微型六足位移台,可实现六自由度运动;BLDC电机;负载3kg;速度6mm/s;电缆长度0.5m。 连接电缆不包含在发货范围内,需单独订购。

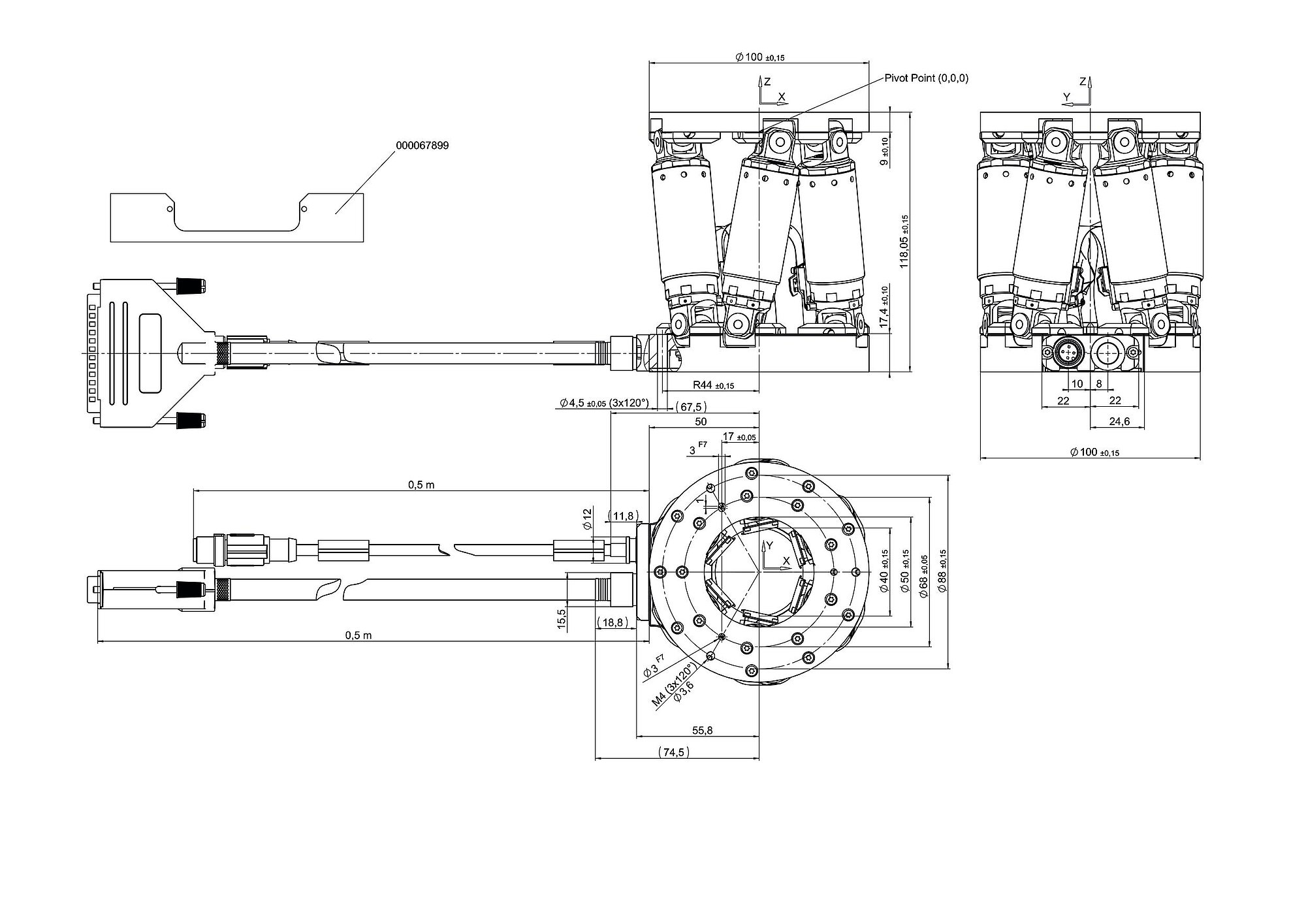
H-810.I2, 尺寸单位为毫米,位于标称行程的零位。 请注意,图纸中以逗号作为小数点分隔符。


采用六自由度并联运动技术方案,相较于串联运动系统更加紧凑、更具刚性、动态性能更强,且无移动电缆,可靠性更高,摩擦力更小。
BLDC电机
无刷直流电机尤其适用于高转速应用。 能够准确对其进行控制并确保高精度。 由于无滑动接触,可无磨损地平稳运行,因此能够实现较长的使用寿命。
PIVirtualMove
该仿真软件可模拟六足位移台的工作区和有效载荷的限值。 因此,在购买之前,您即可验证特定的六足位移台型号是否可以应对应用中出现的负载、力和力矩。 为此,该仿真工具综合考虑了六足位移台的位置和运动,以及枢轴点和多个参考坐标系。
应用领域
工业和科研。 适用于微操纵、生物技术、工具检测。
| 运动 | H-810.I2 | 公差 |
|---|---|---|
| 主动轴 | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| X向的行程 | ± 20 mm | |
| Y向的行程 | ± 20 mm | |
| Z向的行程 | ± 6.5 mm | |
| θX向的旋转范围 | ± 10 ° | |
| θY向的旋转范围 | ± 10 ° | |
| θZ向的旋转范围 | ± 30 ° | |
| X向的最大速度 | 6 mm/s | |
| 推荐速度(X) | 3 mm/s | |
| Y向的最大速度 | 6 mm/s | |
| 推荐速度(Y) | 3 mm/s | |
| Z向的最大速度 | 6 mm/s | |
| 推荐速度(Z) | 3 mm/s | |
| θX向的最大角速度 | 120 mrad/s | |
| 推荐角速度(θX) | 50 mrad/s | |
| θY向的最大角速度 | 120 mrad/s | |
| 推荐角速度(θY) | 50 mrad/s | |
| θZ向的最大角速度 | 120 mrad/s | |
| 推荐角速度(θZ) | 50 mrad/s | |
| 定位 | H-810.I2 | 公差 |
| X向的最小位移 | 0.5 µm | typ. |
| Y向的最小位移 | 0.5 µm | typ. |
| Z向的最小位移 | 0.25 µm | typ. |
| θX向的最小位移 | 8 µrad | typ. |
| θY向的最小位移 | 8 µrad | typ. |
| θZ向的最小位移 | 15 µrad | typ. |
| X向的单向重复精度 | ± 0.3 µm | typ. |
| Y向的单向重复精度 | ± 0.3 µm | typ. |
| Z向的单向重复精度 | ± 0.08 µm | typ. |
| θX向的单向重复精度 | ± 2.5 µrad | typ. |
| θY向的单向重复精度 | ± 2.5 µrad | typ. |
| θZ向的单向重复精度 | ± 10 µrad | typ. |
| X向的空回 | 0.7 µm | typ. |
| Y向的空回 | 0.7 µm | typ. |
| Z向的空回 | 0.2 µm | typ. |
| θX向的空回 | 10 µrad | typ. |
| θY向的空回 | 10 µrad | typ. |
| θZ向的空回 | 20 µrad | typ. |
| 驱动性能 | H-810.I2 | 公差 |
| 驱动类型 | 无刷直流电机 | |
| 标称电压 | 24 V | |
| 机械性能 | H-810.I2 | 公差 |
| 最大负载能力,底板沿水平方向 | 3 kg | |
| 最大负载能力,底板沿任意方向 | 1.5 kg | |
| 最大保持力,底板沿水平方向 | 15 N | |
| 总质量 | 1.7 kg | |
| 材料 | 不锈钢,铝 | |
| 其他 | H-810.I2 | 公差 |
| 工作温度范围 | 0至50 °C | |
| 数据传输连接器 | HD D-sub 78(公头) | |
| 电源电压连接器 | M12 4针(公头) | |
| 电缆长度 | 0.5 m | |
| 电源电缆外径 | 4.95 mm | |
| 固定装置的最小弯曲半径,电源 | 25 mm | |
| 数据传输电缆外径 | 9.5 mm | |
| 固定装置的最小弯曲半径,数据传输 | 95 mm | |
| 推荐控制器/驱动器 | C-887.52x, C-887.53x |
H-810.I2标配电缆长度为0.5m。
测量定位的规格时,使用典型速度。数据以测量报告的形式包含在产品交付中,并存储在PI中。
各个坐标(X、Y、Z、θX、θY、θZ)的最大行程范围是相互依存的。当所有其他轴都处于标称行程范围的零位置并且使用默认坐标系时,或者更确切地说,当旋转中心点设置为0,0,0时,每个轴的数据显示其最大行程范围。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
H-810六足位移台微型机器人
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
微型六足位移台,可实现六自由度运动;BLDC电机;负载3kg;速度6mm/s;电缆长度0.5m。 连接电缆不包含在发货范围内,需单独订购。