具有亚微米级精度和六自由度 (6-DoF) 的并联运动机械(六足位移台)已在光子学、微光学及晶圆级对准等领域获得广泛应用。 为满足工业对可靠性、精度和高动态性能的需求,PI开发出一款紧凑型直接驱动六自由度六足位移台,采用杠杆式促动器设计,有效降低系统复杂性、提升性能并减少磨损。 本文概述了该系统的设计理念,并评估其在工业规模应用中所具备的精度与动态性能。
PI自20世纪90年代初开始为天文学领域开发高精度六足位移台并联运动机械 (PKM)。 此后,这类六轴微定位系统迅速拓展应用至光子学、半导体、生命科学及光学等行业。
随着工业应用对高精度对准与多轴扫描需求的不断增长,市场对结构紧凑、运行稳定且动态性能优异的六自由度PKM的需求也持续上升[1]。

然而,传统的紧凑型丝杠驱动六自由度PKM在执行高频率、大幅度运动时存在一定局限。 如Rudolf等人[2]所指出的,这类系统在小幅度、高频率运动条件下易出现加速磨损问题,因而需采用特殊设计以应对严苛的全天候工业应用场景,例如在>> H-815加固型六足位移台中所采用的方案。 相比之下,直接驱动型PKM结构更为简化,能够实现更高的加速度与运动速度,同时显著降低机械磨损。
尽管基于柔性铰链的系统(如>> PI的H-860[2]或T-Flex六足位移台[3])在精度方面表现优异,但其尺寸与工作空间限制使其难以适应工业产线环境。 为应对这一挑战,PI开发出一种紧凑型直接驱动六自由度PKM,其尺寸与现有丝杠驱动六足位移台相当,兼具高动态响应与优异定位精度,旨在支持工业场景下更高的产量和更短的停机时间。
杠杆式六足位移台设计
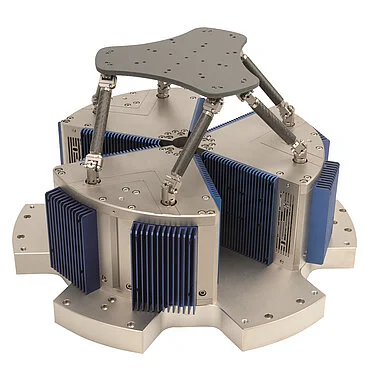
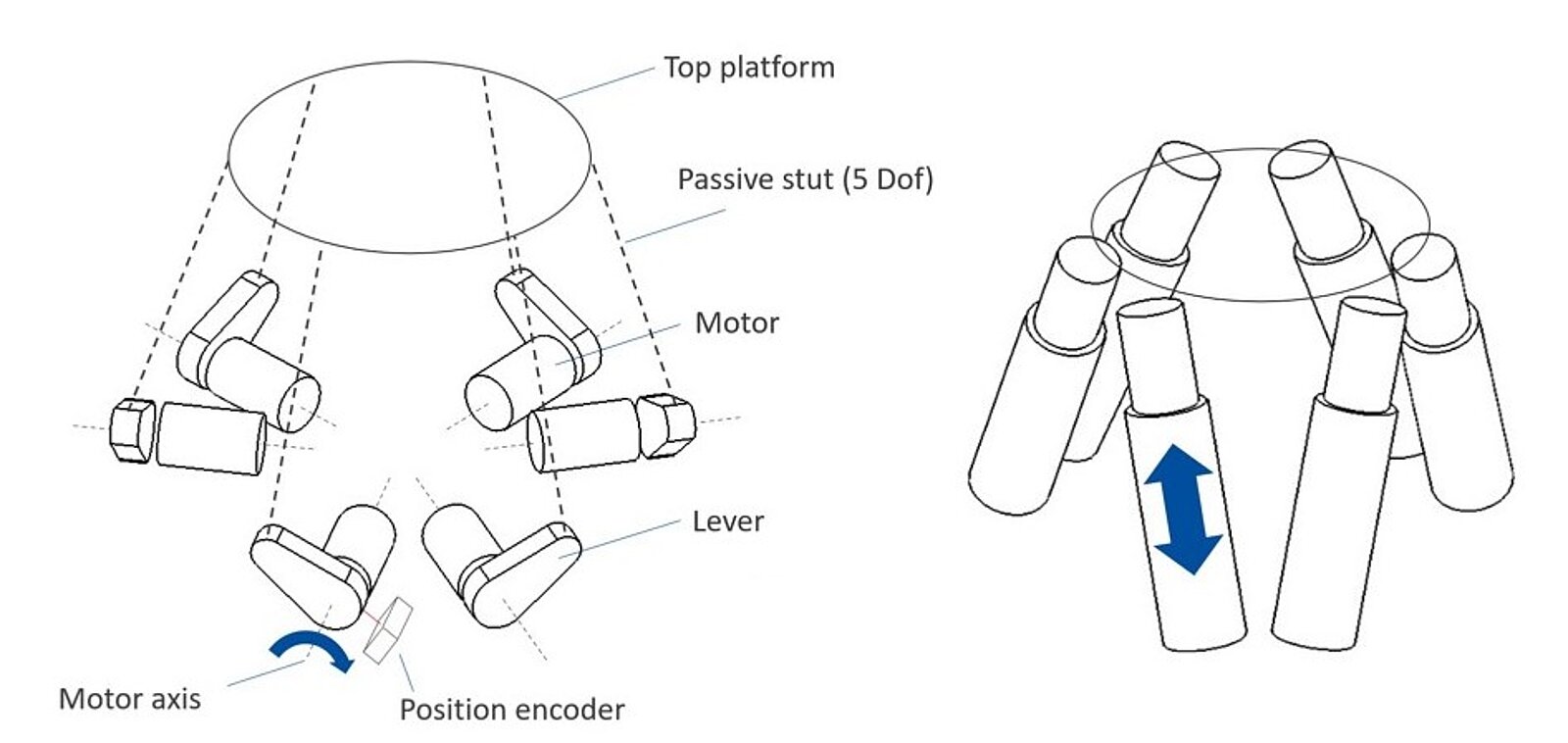
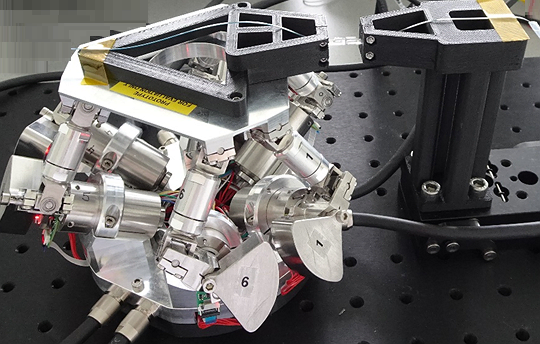
新开发的杠杆驱动六自由度定位系统(见图3)采用并联运动设计[4]。 该系统包含六个相同的促动器,布置在固定底座平台与可动顶部平台之间。 该配置使顶部平台能够沿全部六个轴执行精确的横向和旋转运动: X、Y、Z、俯仰、滚转和偏转。
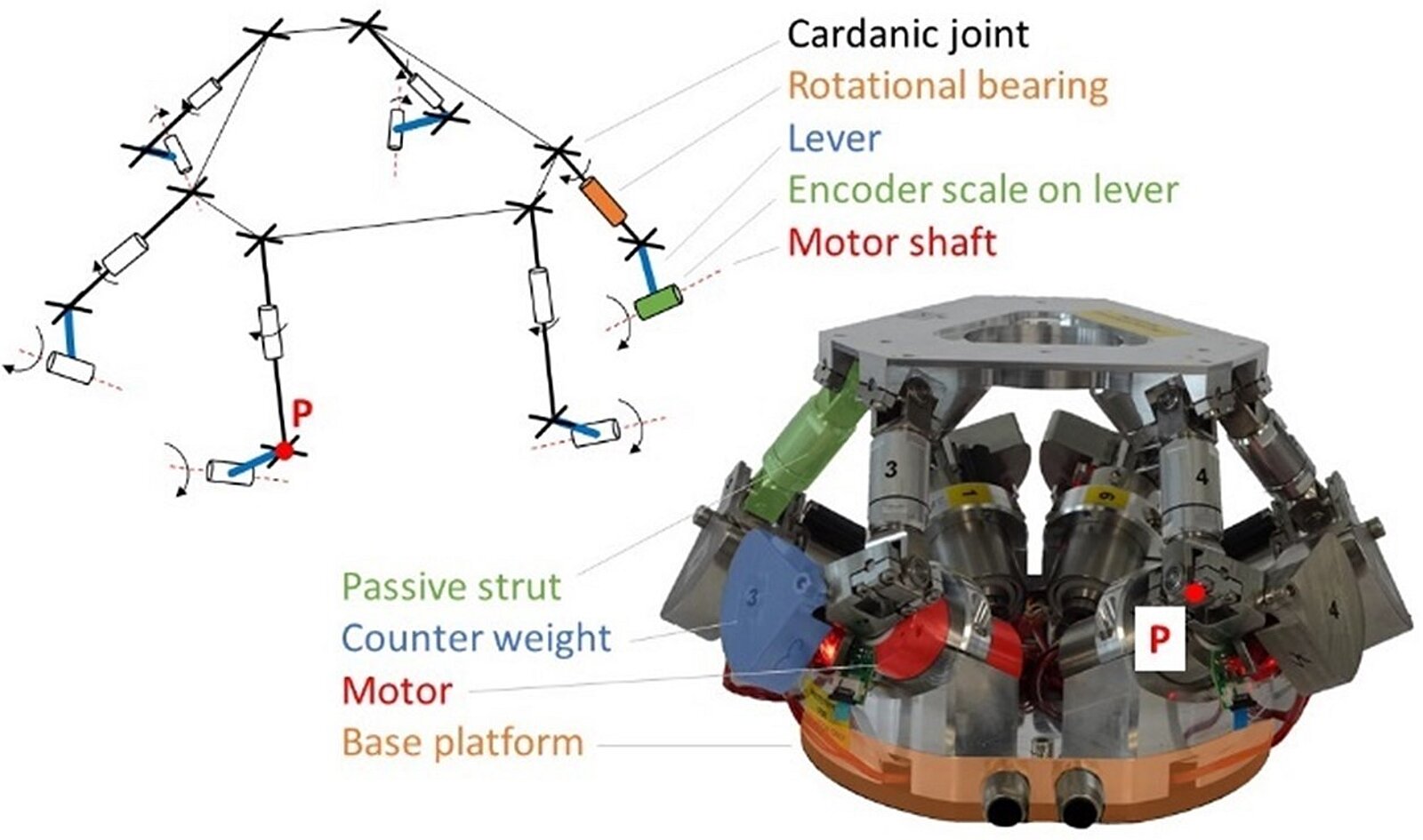
系统的促动器集成在底座平台中,各由一台带陶瓷轴承的无刷直流电机 (BLDC) 及与电机轴相连的杠杆构成。 该设计避免了移动传感器或供电电缆,从而消除了可能损害系统性能的寄生力。 每个杠杆均通过一条被动支撑腿连接到顶部平台,该支撑腿借助两个万向节与一个旋转接头,实现五个自由度。 杠杆的旋转运动带动支撑腿下端沿圆周路径移动,进而驱动顶部平台运动。 杠杆的实际位置通过对侧安装的标尺进行测量(图4a与4b)。
为平衡顶部平台与支撑腿在中立位置时的自重,杠杆上安装了配重。 本型号采用了新开发的万向节。 这些万向节需具备紧凑、轻量、无间隙及大角度行程的特性。 尽管球铰允许在紧凑结构内实现大角度运动,但其存在的摩擦与滞后效应使其不适用于精密应用。 柔性铰链接头虽无滞后问题,但其可用的角度范围有限。 为克服上述权衡,我们开发了一款微型万向节,采用交叉轴与四颗滚珠轴承结构(图4),兼具无间隙性能与大角度运动能力。 除万向节外,每条被动支撑腿还包含一个高精度旋转轴承,使其可绕自身纵轴转动。


杠杆式六足位移台规格
被动支撑腿与杠杆的长度经过精心选择,以匹配PI丝杠驱动型>> H‑811六足位移台的工作空间。 如表1所示,此功能模型的X/Y向行程略有减小,Z向行程则有所增加;其X/Y轴旋转范围保持不变,而Z轴旋转范围约为一半。 尽管因未采用驱动丝杠导致有效载荷较低,该模型仍足以执行多种光子学对准任务,在配备配重时峰值速度可达65 mm/s,是H-811型号 (20 mm/s) 的三倍以上。 系统规格摘要见表1。
六足位移台的理论分辨率取决于杠杆位置(纯Z向运动极限值见表1);然而,借助传感器标尺,其实际精度始终可达到约20 nm。
性能测量
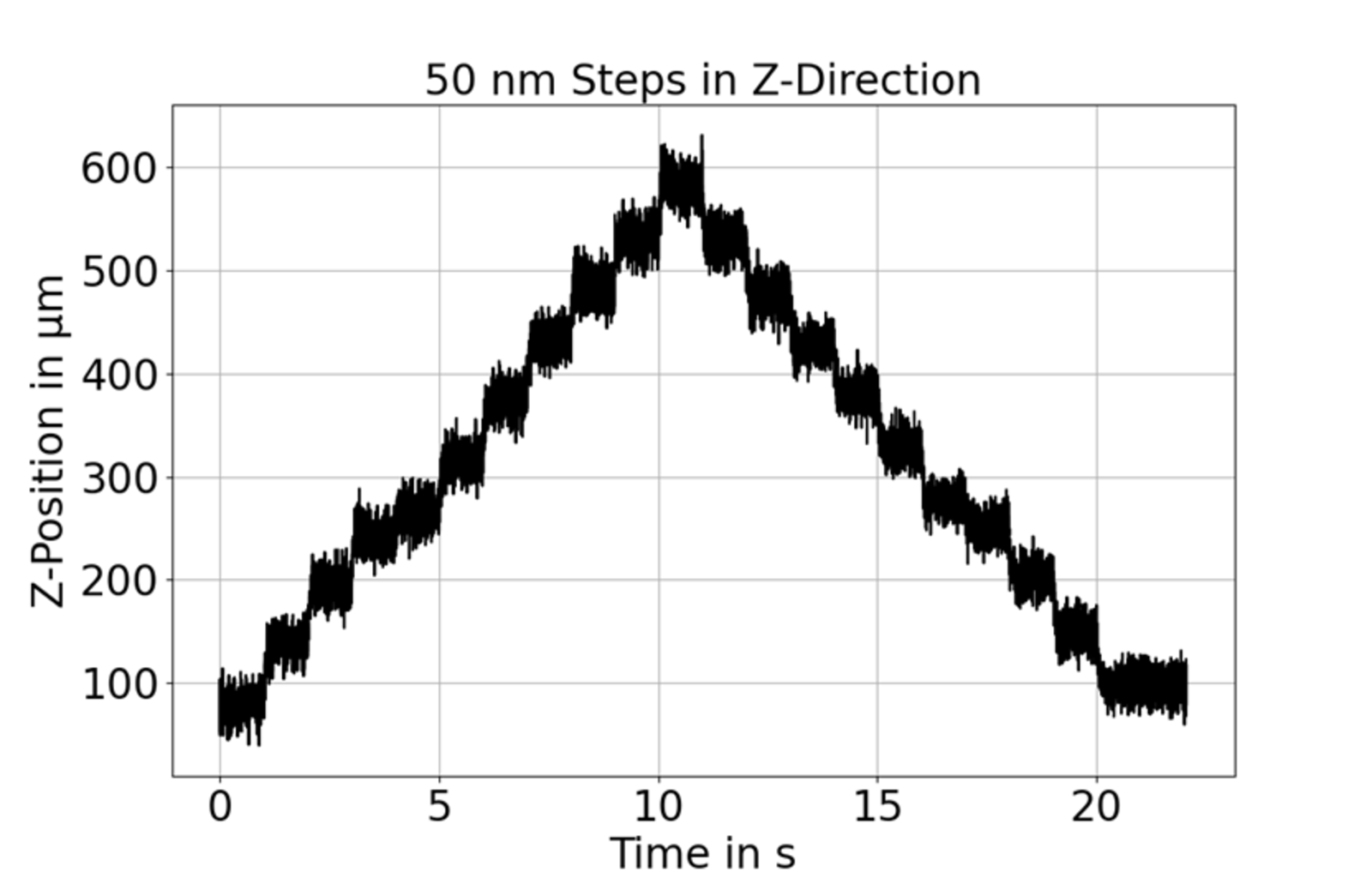
分辨率(此处定义为闭环操作中可可靠执行的最小增量运动 (MIM))通过起始位置附近不同步宽的十步序列确定。 系统的最差分辩率出现在初始位置附近。 图5展示了通过干涉仪测量的Z向50 nm步进位移;在X轴与Y轴方向的类似测试中也观测到相当的性能。 尽管原型机在空闲状态下存在传感器或控制环路噪声,但所执行的步进仍清晰可辨。 总体而言,该系统在所有运动方向上的最小增量运动 (MIM) 均小于100 nm。
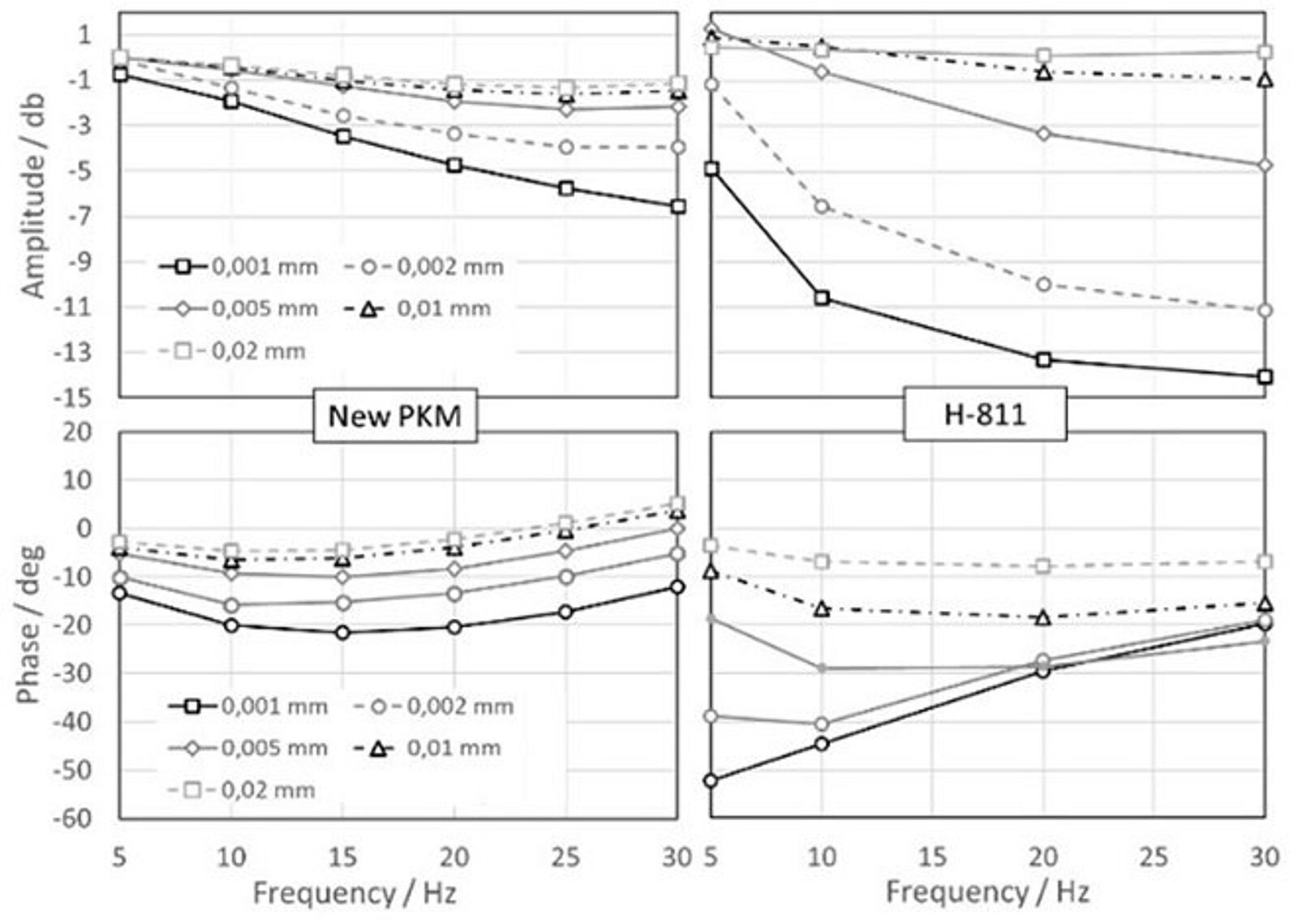
研究进行了频率分析,将新型直接驱动六足位移台与PI紧凑型滚珠丝杠标准型号H-811(该系列中的超高分辨率型号在干涉仪测试中可实现3 nm位置稳定性)进行了比较。 图6展示了不同幅度 (1-20 µm) 与频率 (5-30 Hz) 条件下的幅值误差与相位偏移。 直接驱动型(左)的幅值误差与相位偏移显著低于H-811型号(右)。

参考文献
[1] Sander C et al. 2018 Development of High-Precision Parallel Kinematics for Industrial Automation and Silicon Photonics, Proceedings of the 18th International conference of the European Society for Precision Engineering and Nanotechnology (euspen).
[2] Rudolf C et al. 2015 Direct Driven Hexapods for Highly Dynamic 6DoF Applications, Proceedings of the 15th International conference of the European Society for Precision Engineering and Nanotechnology (euspen).
[3] Naves M et al. 2020 T-Flex: A large range of motion fully flexurebased 6-DOF hexapod, Proceedings of the 20th International conference of the European Society for Precision Engineering and Nanotechnology (euspen).
[4] Volz T. et al. 2024 Compact lever actuated direct driven 6-DoF parallel kinematic positioning system. Proceedings of the 24th International conference of the European Society for Precision Engineering and Nanotechnology (euspen).



