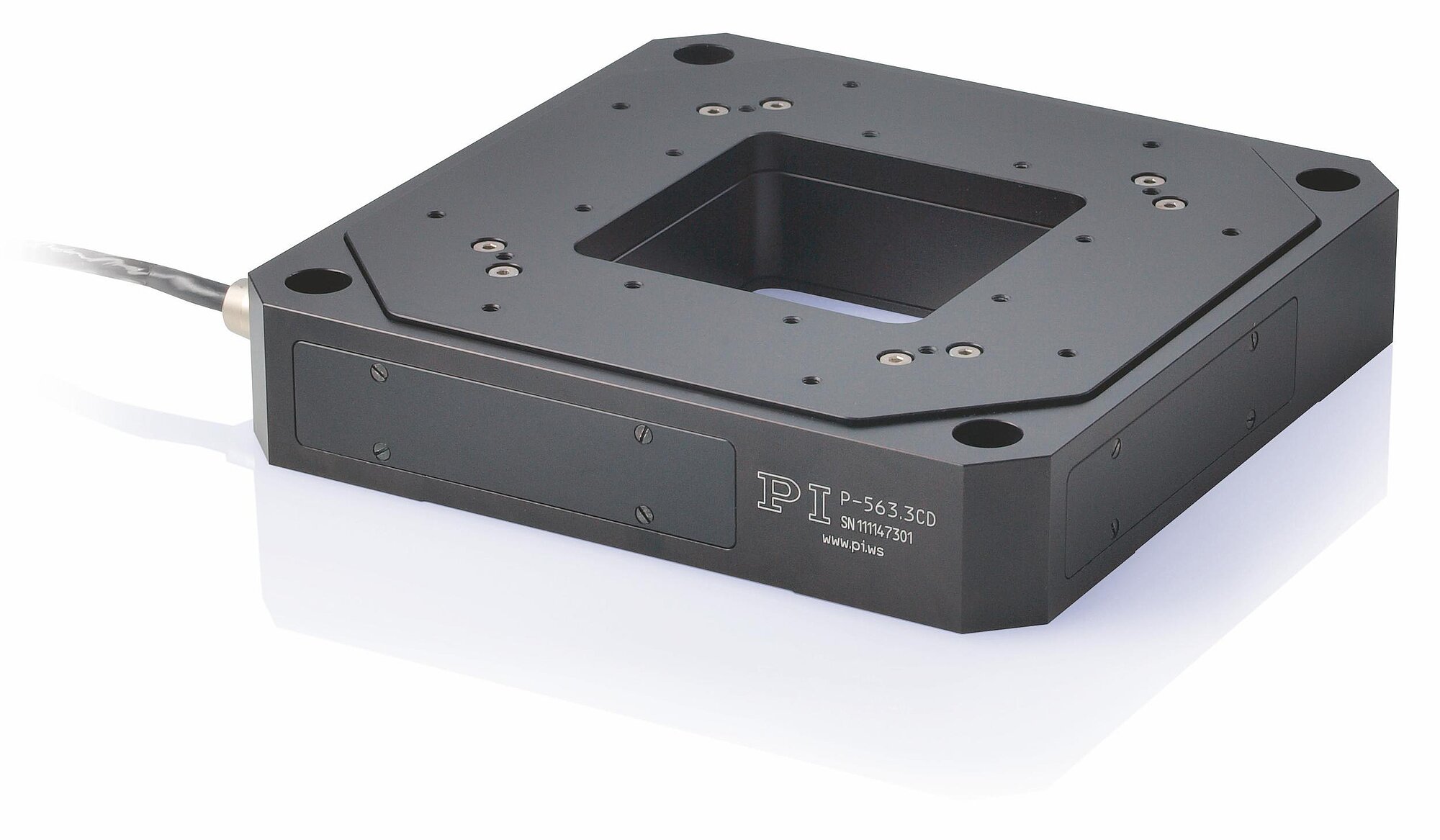
P-561.3CD
PIMars纳米定位平台;行程100µm × 100µm × 100µm (X × Y × Z),电容式间接位置测量;D-sub 25W3 (m)

P-562.3CD的响应行为:X、Y和Z轴的步进和稳定时间小于10ms。

P-56x.3CD和P-56x.3CL,尺寸单位为毫米。 请注意,图纸中以逗号作为小数点分隔符。

P-561.3DD,尺寸单位为毫米。 请注意,图纸中以逗号作为小数点分隔符。




应用领域
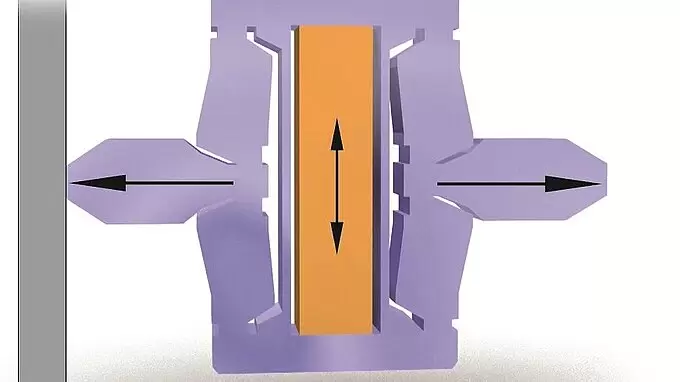
PICMA压电陶瓷促动器带来长使用寿命
PICMA压电陶瓷促动器为全瓷绝缘。 这可以防潮,避免漏电流增大造成故障。 PICMA促动器的使用寿命是传统聚合物绝缘促动器的十倍 它们被证明可实现无故障运行1000亿个循环。
带电容传感器,实现亚纳米级分辨率
电容传感器以亚纳米级分辨率进行测量,且无接触。 它们可带来良好的运动线性度、长期稳定性和千赫兹范围的带宽。
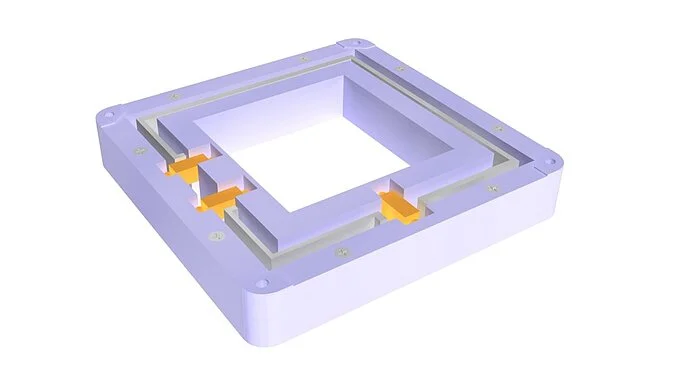
零间隙的柔性铰链导向机构带来高导向精度
柔性铰链导向无需维护、无摩擦、无磨损,无需润滑。 其刚性可实现高负载能力,且它们对冲击和振动不敏感。 其可在较宽的温度范围内工作。
自动配置和快速部件更换
机械单元与控制器可按需组合,更换快捷。 所有伺服与线性化参数均存储在机械单元D-sub连接器的ID芯片中。 数字控制器每次开机时,其自动校准功能都会自动调用这些数据。
采用并行位置测量,实现纳米级高跟踪精度
所有自由度均以同一固定参考基准进行测量 轴间的非预期串扰可实时主动补偿(主动导向;取决于系统带宽)。 即使在动态操作下,也能保持纳米级高跟踪精度。
| 运动 | P-561.3CD | P-561.3CL | P-562.3CD | P-562.3CL | P-563.3CD | P-563.3CL | P-561.3DD | 公差 |
|---|---|---|---|---|---|---|---|---|
| 主动轴 | X ǀ Y ǀ Z | X ǀ Y ǀ Z | X ǀ Y ǀ Z | X ǀ Y ǀ Z | X ǀ Y ǀ Z | X ǀ Y ǀ Z | X ǀ Y ǀ Z | |
| X向的行程 | 100 µm | 100 µm | 200 µm | 200 µm | 300 µm | 300 µm | 45 µm | |
| Y向的行程 | 100 µm | 100 µm | 200 µm | 200 µm | 300 µm | 300 µm | 45 µm | |
| Z向的行程 | 100 µm | 100 µm | 200 µm | 200 µm | 300 µm | 300 µm | 15 µm | |
| X向的开环行程,电压-20至120V | 150 µm | 150 µm | 300 µm | 300 µm | 340 µm | 340 µm | 58 µm | +20 % / -0 % |
| Y向的开环行程,电压-20至120V | 150 µm | 150 µm | 300 µm | 300 µm | 340 µm | 340 µm | 58 µm | +20 % / -0 % |
| Z向的开环行程,电压-20至120V | 150 µm | 150 µm | 300 µm | 300 µm | 340 µm | 340 µm | 18 µm | +20 % / -0 % |
| X向的线性误差 | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | max. |
| Y向的线性误差 | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | max. |
| Z向的线性误差 | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.03 % | 0.08 % | max. |
| 直线度误差E_XZ | ± 30 nm | ± 30 nm | ± 50 nm | ± 50 nm | ± 50 nm | ± 50 nm | ± 20 nm | typ. |
| 直线度误差E_YZ | ± 30 nm | ± 30 nm | ± 50 nm | ± 50 nm | ± 50 nm | ± 50 nm | ± 20 nm | typ. |
| 直线度误差E_ZX(平面度) | ± 15 nm | ± 15 nm | ± 20 nm | ± 20 nm | ± 25 nm | ± 25 nm | ± 10 nm | typ. |
| 直线度误差E_ZY(平面度) | ± 15 nm | ± 15 nm | ± 20 nm | ± 20 nm | ± 25 nm | ± 25 nm | ± 10 nm | typ. |
| 角度误差E_AY(俯仰角) | ± 1 µrad | ± 1 µrad | ± 2 µrad | ± 2 µrad | ± 2 µrad | ± 2 µrad | ± 3 µrad | typ. |
| 角度误差E_AZ | ± 15 µrad | ± 15 µrad | ± 20 µrad | ± 20 µrad | ± 25 µrad | ± 25 µrad | ± 3 µrad | typ. |
| 角度误差E_BX(俯仰角) | ± 1 µrad | ± 1 µrad | ± 2 µrad | ± 2 µrad | ± 2 µrad | ± 2 µrad | ± 3 µrad | typ. |
| 角度误差E_BZ | ± 15 µrad | ± 15 µrad | ± 20 µrad | ± 20 µrad | ± 25 µrad | ± 25 µrad | ± 3 µrad | typ. |
| 角度误差E_CX(偏转角) | ± 6 µrad | ± 6 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 3 µrad | typ. |
| 角度误差E_CY(偏转角) | ± 6 µrad | ± 6 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 3 µrad | typ. |
| 定位 | P-561.3CD | P-561.3CL | P-562.3CD | P-562.3CL | P-563.3CD | P-563.3CL | P-561.3DD | 公差 |
| X向的单向重复精度 | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | typ. |
| Y向的单向重复精度 | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | ± 2 nm | typ. |
| Z向的单向重复精度 | ± 2 nm | ± 2 nm | ± 4 nm | ± 4 nm | ± 4 nm | ± 4 nm | ± 2 nm | typ. |
| X向的开环分辨率 | 0.2 nm | 0.2 nm | 0.4 nm | 0.4 nm | 0.5 nm | 0.5 nm | 0.1 nm | typ. |
| Y向的开环分辨率 | 0.2 nm | 0.2 nm | 0.4 nm | 0.4 nm | 0.5 nm | 0.5 nm | 0.1 nm | typ. |
| Z向的开环分辨率 | 0.2 nm | 0.2 nm | 0.4 nm | 0.4 nm | 0.5 nm | 0.5 nm | 0.1 nm | typ. |
| 集成传感器 | 电容式,间接位置测量 | 电容式,间接位置测量 | 电容式,间接位置测量 | 电容式,间接位置测量 | 电容式,间接位置测量 | 电容式,间接位置测量 | 电容式,间接位置测量 | |
| X向的系统分辨率 | 0.8 nm | 0.8 nm | 1 nm | 1 nm | 2 nm | 2 nm | 0.2 nm | |
| Y向的系统分辨率 | 0.8 nm | 0.8 nm | 1 nm | 1 nm | 2 nm | 2 nm | 0.2 nm | |
| Z向的系统分辨率 | 0.8 nm | 0.8 nm | 1 nm | 1 nm | 2 nm | 2 nm | 0.2 nm | |
| 驱动性能 | P-561.3CD | P-561.3CL | P-562.3CD | P-562.3CL | P-563.3CD | P-563.3CL | P-561.3DD | 公差 |
| 驱动类型 | PICMA | PICMA | PICMA | PICMA | PICMA | PICMA | PICMA | |
| X向的电容 | 5.2 µF | 5.2 µF | 7.4 µF | 7.4 µF | 7.4 µF | 7.4 µF | 38 µF | ±20 % |
| Y向的电容 | 5.2 µF | 5.2 µF | 7.4 µF | 7.4 µF | 7.4 µF | 7.4 µF | 38 µF | ±20 % |
| Z向的电容 | 10.4 µF | 10.4 µF | 14.8 µF | 14.8 µF | 14.8 µF | 14.8 µF | 6 µF | ±20 % |
| 机械性能 | P-561.3CD | P-561.3CL | P-562.3CD | P-562.3CL | P-563.3CD | P-563.3CL | P-561.3DD | 公差 |
| X向的谐振频率,空载 | 190 Hz | 190 Hz | 160 Hz | 160 Hz | 140 Hz | 140 Hz | 920 Hz | ±20 % |
| 在350g负载下X向的谐振频率 | 150 Hz | 150 Hz | 125 Hz | 125 Hz | 93 Hz | 93 Hz | 640 Hz | ±20 % |
| Y向的谐振频率,空载 | 190 Hz | 190 Hz | 160 Hz | 160 Hz | 140 Hz | 140 Hz | 920 Hz | ±20 % |
| 在350g负载下Y向的谐振频率 | 150 Hz | 150 Hz | 125 Hz | 125 Hz | 93 Hz | 93 Hz | 640 Hz | ±20 % |
| Z向的谐振频率,空载 | 380 Hz | 380 Hz | 315 Hz | 315 Hz | 250 Hz | 250 Hz | 1050 Hz | ±20 % |
| 在350g负载下Z向的谐振频率 | 260 Hz | 260 Hz | 211 Hz | 211 Hz | 148 Hz | 148 Hz | 695 Hz | ±20 % |
| X向的允许推力 | 60 N | 60 N | 50 N | 50 N | 40 N | 40 N | 200 N | max. |
| Y向的允许推力 | 60 N | 60 N | 50 N | 50 N | 40 N | 40 N | 200 N | max. |
| Z向的允许推力 | 100 N | 100 N | 60 N | 60 N | 30 N | 30 N | 250 N | max. |
| X向的允许拉力 | 40 N | 40 N | 40 N | 40 N | 30 N | 30 N | 70 N | max. |
| Y向的允许拉力 | 40 N | 40 N | 40 N | 40 N | 30 N | 30 N | 70 N | max. |
| Z向的允许拉力 | 100 N | 100 N | 60 N | 60 N | 30 N | 30 N | 60 N | max. |
| 导轨 | 带杠杆放大的柔性铰链导轨 | 带杠杆放大的柔性铰链导轨 | 带杠杆放大的柔性铰链导轨 | 带杠杆放大的柔性铰链导轨 | 带杠杆放大的柔性铰链导轨 | 带杠杆放大的柔性铰链导轨 | 带直接驱动器的柔性铰链导轨 | |
| 总质量 | 1450 g | 1450 g | 1450 g | 1450 g | 1450 g | 1450 g | 1550 g | ±5 % |
| 材料 | 铝 | 铝 | 铝 | 铝 | 铝 | 铝 | 铝 | |
| 在100g负载下X向的谐振频率 | — | — | 145 Hz | 145 Hz | 120 Hz | 120 Hz | 860 Hz | ±20 % |
| 在100g负载下Y向的谐振频率 | — | — | 145 Hz | 145 Hz | 120 Hz | 120 Hz | 860 Hz | ±20 % |
| 在100g负载下Z向的谐振频率 | — | — | 275 Hz | 275 Hz | 215 Hz | 215 Hz | 950 Hz | ±20 % |
| 其他 | P-561.3CD | P-561.3CL | P-562.3CD | P-562.3CL | P-563.3CD | P-563.3CL | P-561.3DD | 公差 |
| 工作温度范围 | -20至80 °C | -20至80 °C | -20至80 °C | -20至80 °C | -20至80 °C | -20至80 °C | -20至80 °C | |
| 接头 | D-sub 25W3(公头) | LEMO LVPZT | D-sub 25W3(公头) | LEMO LVPZT | D-sub 25W3(公头) | LEMO LVPZT | D-sub 25W3(公头) | |
| 电缆长度 | 1.5 m | 1.5 m | 1.5 m | 1.5 m | 1.5 m | 1.5 m | 1.5 m | +50 mm / -0 mm |
| 推荐控制器/驱动器 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 | E-503、E-505、E-621、E-713、E-727 |
P-561.3DD的线性误差:配备数字控制器。 采用模拟控制器时,直接驱动定位器的非线性度通常高达0.1%。
仅X轴和Y轴(Z轴除外)采用并联运动机构。
因为PI压电陶瓷纳米定位系统无摩擦,所以系统分辨率仅受放大器噪声和测量技术的限制。
可提供超殷钢和钛合金版本。
咨询定制版本。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
Unpacking and Packing P-5xx Positioners
P-561、P-562、P-563 PIMars XYZ纳米定位系统
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
PIMars纳米定位平台;行程100µm × 100µm × 100µm (X × Y × Z),电容式间接位置测量;D-sub 25W3 (m)
PIMars纳米定位平台;行程100µm × 100µm × 100µm (X × Y × Z),电容式间接位置测量;LEMO LVPZT
PIMars纳米定位平台;行程200µm × 200µm × 200µm (X × Y × Z),电容式间接位置测量;D-sub 25W3 (m)
PIMars纳米定位平台;行程200µm × 200µm × 200µm (X × Y × Z),电容式间接位置测量;LEMO LVPZT
PIMars纳米定位平台;行程300µm × 300µm × 300µm (X × Y × Z),电容式间接位置测量;D-sub 25W3 (m)
PIMars 纳米定位平台;行程300µm × 300µm × 300µm (X × Y × Z),电容式间接位置测量;LEMO LVPZT
PIMars纳米定位平台;行程45µm × 45µm × 15µm (X × Y × Z);电容式间接位置测量;D-sub 25W3 (m);直接驱动