V-622.A100
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径85mm;有效载荷100N;最大角速度1200min⁻¹;增量角度测量系统,传感器分辨率0.13µrad;旋转式,正弦/余弦,1Vpp







产品概述
V-62x系列直驱回转台兼顾精密度与结构刚性,寿命长、易操作,可在任意方向上安装。 V-62x回转台在行程精度、平面度和摆动方面表现颇佳。 高精度深沟球轴承在出厂前已完成预紧并润滑,因此在回转台的整个使用寿命期间免维护。
直驱力矩电机
力矩电机为电磁直接驱动器。 其无需动力传动系统中的机械部件,可将驱动力直接、无摩擦地传递到运动平台。 驱动器可实现高速度和高加速度。
绝对编码器(可选配)
绝对编码器提供明确的位置信息,帮助即刻确定位置。 因此,接通时无需回零操作,有效提升运行效率和安全性。
附件和可选配件
应用领域
样品检测。 精密微装配。 研究。 生物技术。 半导体测试与检测。 测量技术。 自动化技术。 设备组装。 激光微加工。 传感器校准与测试。
| 运动 | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | 公差 |
|---|---|---|---|---|---|---|---|
| 主动轴 | θZ | θZ | θZ | θZ | θZ | θZ | |
| θZ向的旋转范围 | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | |
| θZ向的最大角速度,空载 | 1200 rpm | 1000 rpm | 200 rpm | 1200 rpm | 1000 rpm | 200 rpm | |
| X向上的径向误差 | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | typ. |
| 轴向误差 | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | typ. |
| 绕X的倾斜误差(摆动角) | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | typ. |
| 定位 | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | 公差 |
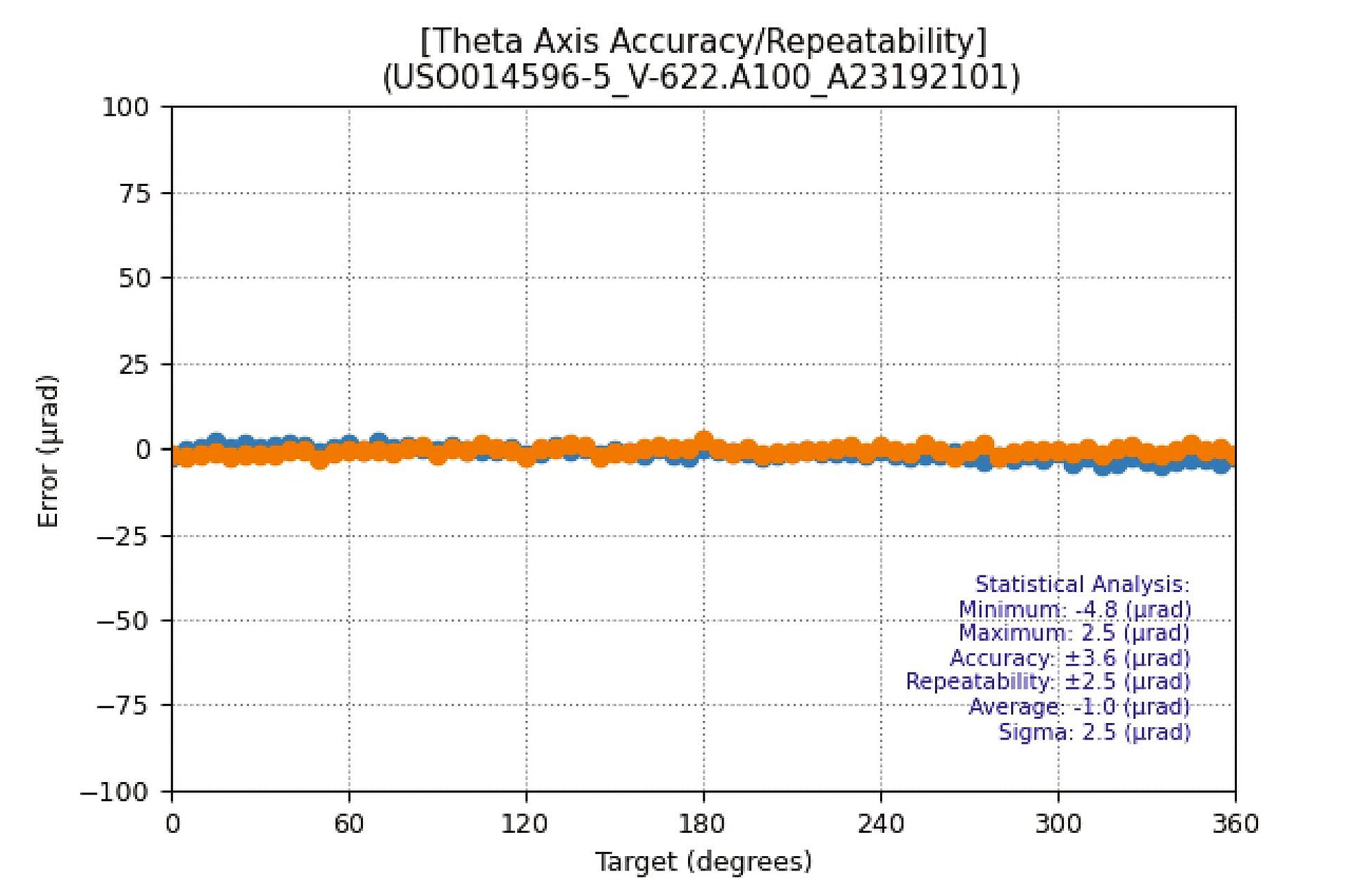
| θZ向的已校准定位精度 | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | typ. |
| θZ向的双向重复精度 | 10 µrad | 10 µrad | 5 µrad | 10 µrad | 10 µrad | 5 µrad | typ. |
| 参考点开关 | 1/转,一个传感器信号周期内差分脉冲,1Vpp | 1/转,一个传感器信号周期内差分脉冲,1Vpp | 1/转,一个传感器信号周期内差分脉冲,1Vpp | — | — | — | |
| 集成传感器 | 增量式角度测量系统 | 增量式角度测量系统 | 增量式角度测量系统 | 绝对式角度测量系统 | 绝对式角度测量系统 | 绝对式角度测量系统 | |
| 传感器信号 | 正弦/余弦,1Vpp | 正弦/余弦,1Vpp | 正弦/余弦,1Vpp | BiSS-C,32bit | BiSS-C,32bit | BiSS-C,32bit | |
| 传感器信号周期/U | 11840 | 15744 | 31488 | — | — | — | |
| 传感器分辨率,旋转 | 0.13 µrad | 0.097 µrad | 0.049 µrad | 0.0015 µrad | 0.0015 µrad | 0.0015 µrad | |
| 驱动性能 | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | 公差 |
| 驱动类型 | 无铁芯三相力矩电机 | 无铁芯三相力矩电机 | 无铁芯三相力矩电机 | 无铁芯三相力矩电机 | 无铁芯三相力矩电机 | 无铁芯三相力矩电机 | |
| 峰值电压 | 80 V | 80 V | 80 V | 80 V | 80 V | 80 V | |
| 标称电流,均方根 | 4.9 A | 4.6 A | 4.3 A | 4.9 A | 4.6 A | 4.3 A | typ. |
| 峰值电流,均方根 | 13.8 A | 13.8 A | 13.8 A | 13.8 A | 13.8 A | 13.8 A | typ. |
| θZ向的驱动力矩 | 0.57 N·m | 1.4 N·m | 4.1 N·m | 0.57 N·m | 1.4 N·m | 4.1 N·m | |
| θZ向的峰值力矩 | 1.22 N·m | 2.9 N·m | 9.3 N·m | 1.22 N·m | 2.9 N·m | 9.3 N·m | |
| 力矩常数 | 0.117 N·m/A | 0.3 N·m/A | 0.96 N·m/A | 0.117 N·m/A | 0.3 N·m/A | 0.96 N·m/A | typ. |
| 相间电阻 | 1.7 Ω | 2.76 Ω | 4.94 Ω | 1.7 Ω | 2.76 Ω | 4.94 Ω | typ. |
| 相间电感 | 2.7 mH | 5.2 mH | 9.8 mH | 2.7 mH | 5.2 mH | 9.8 mH | |
| 相间反电动势,旋转 | 10 V/kRPM | 25 V/kRPM | 82 V/kRPM | 10 V/kRPM | 25 V/kRPM | 82 V/kRPM | max. |
| 极对数 | 12 | 20 | 36 | 12 | 20 | 36 | |
| 机械性能 | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | 公差 |
| X向的允许推力 | 50 N | 75 N | 100 N | 50 N | 75 N | 100 N | max. |
| Y向的允许推力 | 50 N | 75 N | 100 N | 50 N | 75 N | 100 N | max. |
| Z向的允许推力 | 100 N | 150 N | 400 N | 100 N | 150 N | 400 N | max. |
| θX向的允许力矩 | 5 N·m | 10 N·m | 20 N·m | 5 N·m | 10 N·m | 20 N·m | max. |
| θY向的允许力矩 | 5 N·m | 10 N·m | 20 N·m | 5 N·m | 10 N·m | 20 N·m | max. |
| θZ向的惯性力矩,空载 | 331 kg·mm² | 1188 kg·mm² | 26000 kg·mm² | 331 kg·mm² | 1188 kg·mm² | 26000 kg·mm² | ±20 % |
| 轴承类型 | 滚珠轴承 | 滚珠轴承 | 滚珠轴承 | 滚珠轴承 | 滚珠轴承 | 滚珠轴承 | |
| 总质量 | 1300 g | 2400 g | 11000 g | 1300 g | 2400 g | 11000 g | ±5 % |
| 材料 | 硬膜铝(基体),不锈钢(轴承及安装硬件) | 硬膜铝(基体),不锈钢(轴承及安装硬件) | 硬膜铝(基体),不锈钢(轴承及安装硬件) | 硬膜铝(基体),不锈钢(轴承及安装硬件) | 硬膜铝(基体),不锈钢(轴承及安装硬件) | 硬膜铝(基体),不锈钢(轴承及安装硬件) | |
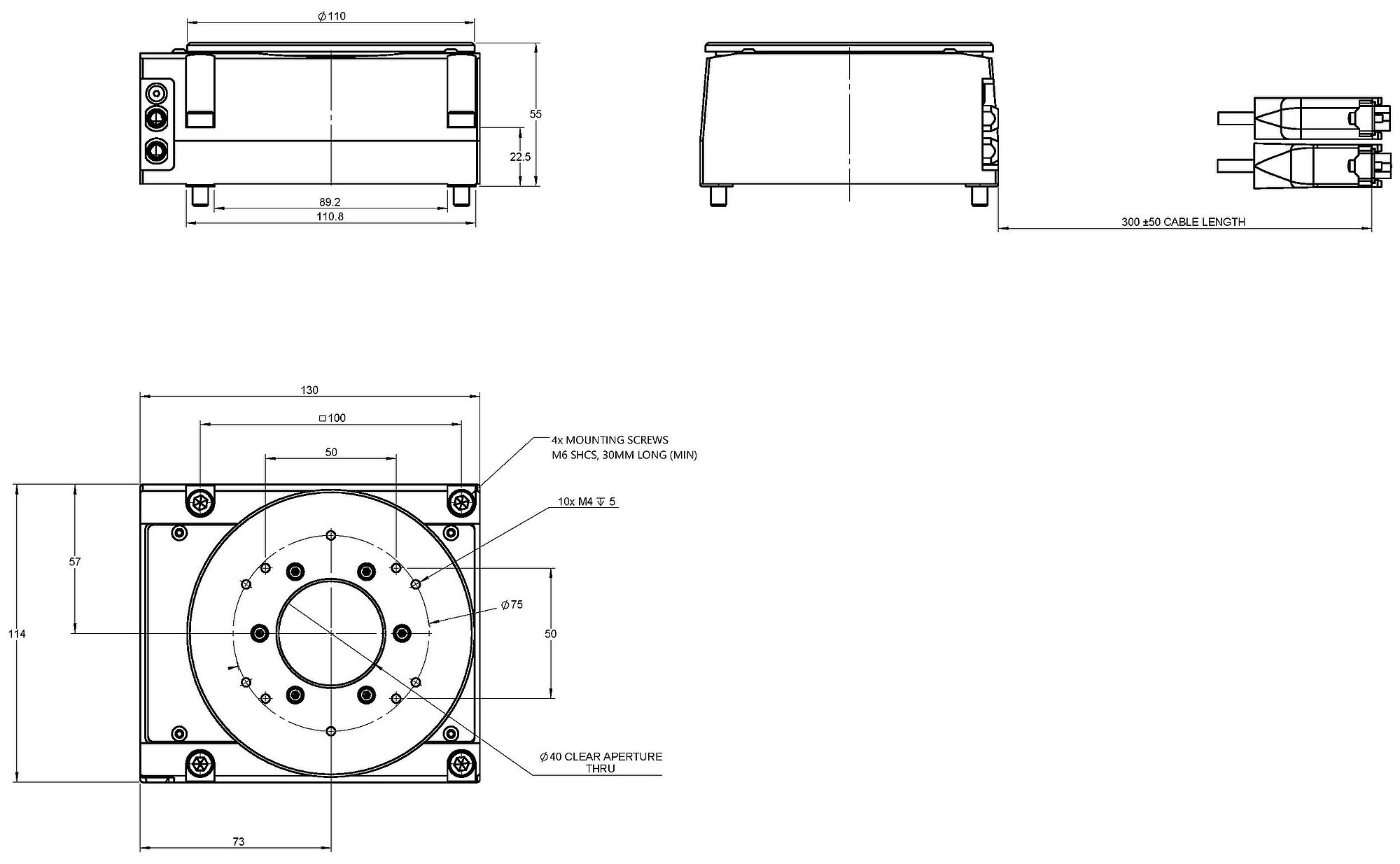
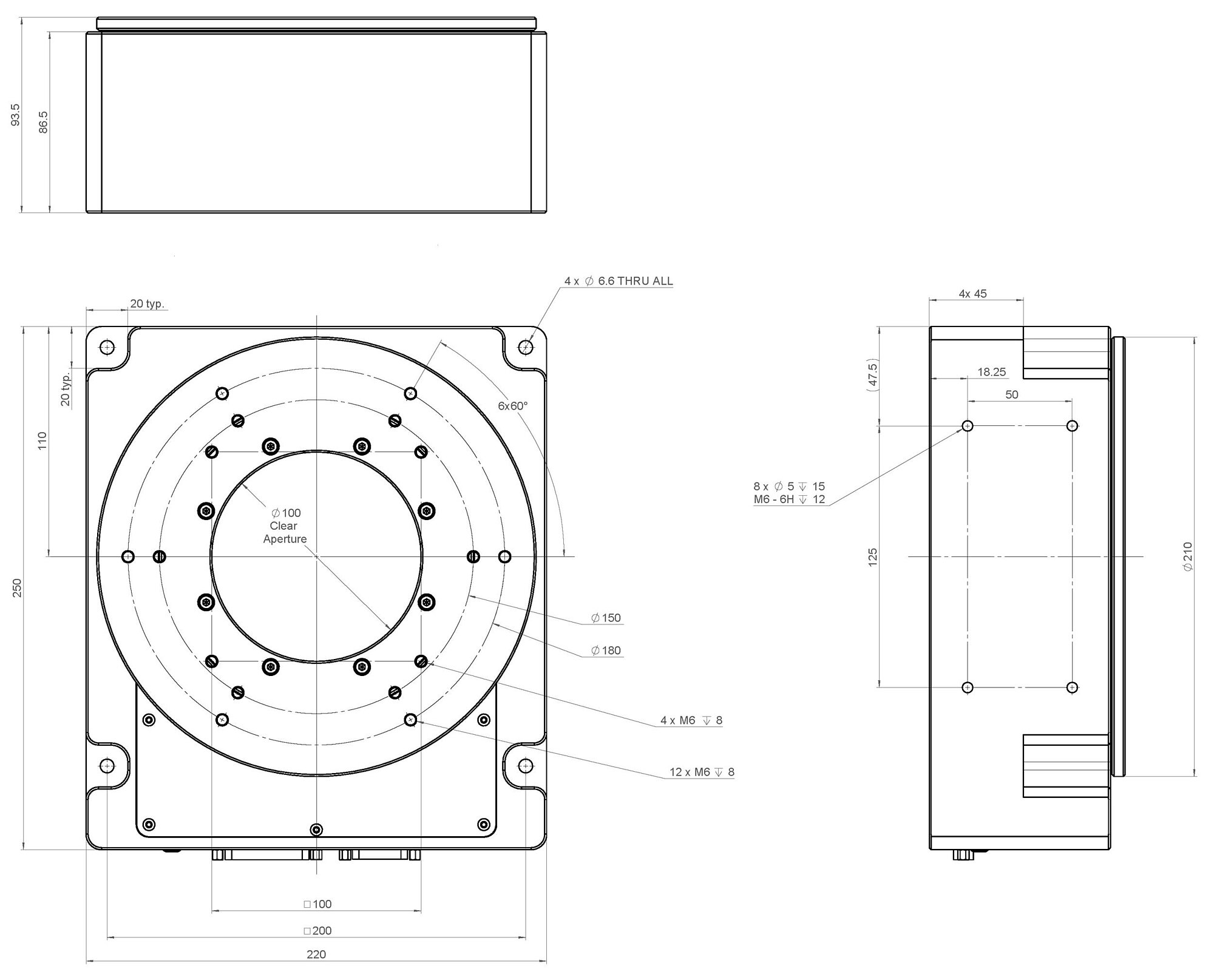
| 通光孔径 | 15 mm | 40 mm | 100 mm | 15 mm | 40 mm | 100 mm | |
| 运动平台直径 | 85 mm | 110 mm | 210 mm | 85 mm | 110 mm | 210 mm | |
| 高度 | 50 mm | 55 mm | 93.5 mm | 50 mm | 55 mm | 93.5 mm | |
| 其他 | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | 公差 |
| 工作温度范围 | 5至50 °C | 5至50 °C | 5至50 °C | 5至50 °C | 5至50 °C | 5至50 °C | |
| 接头 | D-sub 9W4(公头) | D-sub 9W4(公头) | D-sub 9W4(公头) | D-sub 9W4(公头) | D-sub 9W4(公头) | D-sub 9W4(公头) | |
| 传感器连接器 | D-sub 15(公头) | D-sub 15(公头) | D-sub 15(公头) | D-sub 15(公头) | D-sub 15(公头) | D-sub 15(公头) | |
| 推荐控制器/驱动器 | A-81x、A-82x | A-81x、A-82x | A-81x、A-82x | A-81x、A-82x | A-81x、A-82x | A-81x、A-82x |
关于线性与转动串扰的说明:取决于底面质量、负载、安装方向以及外部作用在回转台上的力。 与具体应用相关的参数,请联系PI获取。 所列数值均在静态条件下测得(测量过程中无旋转运动),且为无负载状态。
关于角速度的说明:可能受负载不平衡、控制器或驱动器限制。
关于A-62x.Axxx传感器分辨率的说明:假设采用4096倍插值。 有关其他因子的使用,请联系PI。
关于定位精度的说明:所标注的数值基于由控制器控制的误差补偿。 为实现这些数值,平台须与PI控制器一同订购。 精度值取短时间段,不考虑平台上热漂移的长期影响。
关于允许推力与允许力矩的说明:最大承载能力相互排斥、不可同时满足。例如,该回转台只能在以下之一条件下加载:X/Y向最大允许推力,或Z向最大允许推力,或绕θX/θY的最大允许力矩。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径85mm;有效载荷100N;最大角速度1200min⁻¹;增量角度测量系统,传感器分辨率0.13µrad;旋转式,正弦/余弦,1Vpp
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径110mm;有效载荷150N;最大角速度1000min⁻¹;增量角度测量系统,传感器分辨率0.097µrad;旋转式,正弦/余弦,1Vpp
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径210mm;有效载荷400N;最大角速度200min⁻¹;增量角度测量系统,传感器分辨率0.049µrad;旋转式,正弦/余弦,1Vpp
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径85mm;有效载荷100N;最大角速度1200min⁻¹;绝对角度测量系统,传感器分辨率0.0015µrad;旋转式,BiSS-C,32位
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径110mm;有效载荷150N;最大角速度1000min⁻¹;绝对角度测量系统,传感器分辨率0.0015µrad;旋转式,BiSS-C,32位
高精度直驱回转台;无铁芯三相力矩电机;旋转角度360°;运动平台直径210mm;有效载荷400N;最大角速度200min⁻¹;绝对角度测量系统,传感器分辨率0.0015µrad;旋转式,BiSS-C,32位