L-509.021100V6
真空兼容型精密线性平台;两相步进电机;行程为26mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁶hPa














产品概述
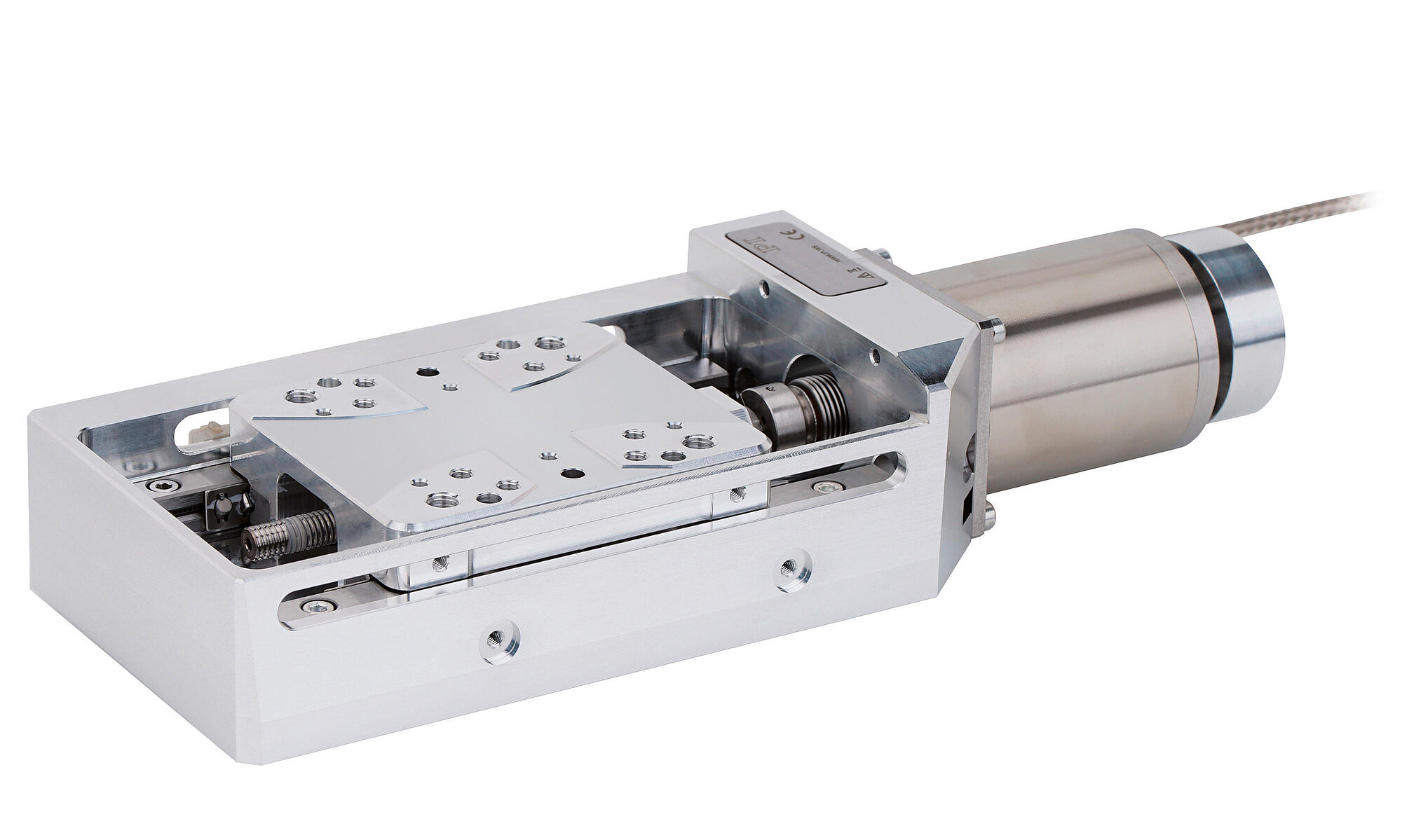
带防蠕动系统的交叉滚柱导轨带来高运动精度和有效载荷。 精密滚珠丝杠,螺距为1mm。 紧凑型设计。 消除应力的铝基座可实现高稳定性。 限位开关。 位于行程中点带方向感应的非接触式光学参考点开关。
减少除气,特别是在真空环境中使用时
最值得注意的是,导轨和主轴的润滑采用了一种逸气特性极低的材料。 该系统可承受高达80°C的温度。 通过对PI V6真空等级的这一和其他修改,此定位器可以使用高达10-6hPa。
更高质量,适用于高真空应用
在这种情况下,使用适合高真空的特殊组件,如电机、测量系统和限位开关。 此外,表面由无涂层铝制成,主轴和导轨由不锈钢制成。 这样,PI V7真空等级就达到了,这意味着高达10-7hPa。
最高质量,可满足超高真空的特殊要求
在此真空等级中,产品在所有细节上都进行了优化,并采用了适用于超高真空的组件,以便达到高达10-9hPa的PI V9真空等级。 除其他外,只有选定类型的塑料用于此目的,使用测量系统时耐受温度为120°C,不使用测量系统时耐受温度为150°C。
可用电机类型
位置测量的类型
应用领域
真空腔。 研究。 高能束线设备。 显微镜。 电子元件组装和检验。
| 运动 | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | 公差 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 主动轴 | X | X | X | X | X | X | X | X | X | X | X | |
| X向的行程 | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 52 mm | 102 mm | |
| X向的最大速度,空载 | 10 mm/s | 10 mm/s | 10 mm/s | 1.5 mm/s | 1.5 mm/s | 1.5 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | |
| Y向上的直线度误差(直线度) | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 4 µm | ± 8 µm | typ. |
| Z向上的直线度误差(平面度) | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 4 µm | ± 8 µm | typ. |
| 绕Y的角度误差(俯仰角) | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 90 µrad | ± 120 µrad | typ. |
| 绕Z的角度误差(偏转角) | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 90 µrad | ± 120 µrad | typ. |
| 定位 | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | 公差 |
| X向的最小位移 | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | typ. |
| X向的单向重复精度 | ± 0.15 µm | ± 0.15 µm | ± 0.15 µm | ± 0.05 µm | ± 0.05 µm | ± 0.05 µm | ± 0.15 µm | ± 0.15 µm | ± 0.15 µm | ± 0.15 µm | ± 0.15 µm | typ. |
| 限位开关 | 叉式光电传感器,常闭触点,5V,NPN | 叉式光电传感器,常闭触点,5V,NPN | 叉式光电传感器,常闭触点,5V,NPN | 叉式光电传感器,常闭触点,5V,NPN | 叉式光电传感器,常闭触点,5V,NPN | 叉式光电传感器,常闭触点,5V,NPN | 机械式 | 机械式 | 机械式 | 机械式 | 机械式 | |
| 电机编码器: 传感器信号 | — | — | — | A/B正交,RS-422 | A/B正交,RS-422 | A/B正交,RS-422 | — | — | — | — | — | |
| 电机编码器 | — | — | — | 增量式旋转编码器 | 增量式旋转编码器 | 增量式旋转编码器 | — | — | — | — | — | |
| 驱动性能 | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | 公差 |
| 驱动类型 | 两相步进电机 | 两相步进电机 | 两相步进电机 | 直流齿轮电机 | 直流齿轮电机 | 直流齿轮电机 | 两相步进电机 | 两相步进电机 | 两相步进电机 | 两相步进电机 | 两相步进电机 | |
| 标称电压 | 24 V | 24 V | 24 V | 12 V | 12 V | 12 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| 最大功耗 | 10 W | 10 W | 10 W | — | — | — | 10 W | 10 W | 10 W | 10 W | 10 W | |
| 电机分辨率 | 200 全步/转 | 200 全步/转 | 200 全步/转 | — | — | — | 200 全步/转 | 200 全步/转 | 200 全步/转 | 200 全步/转 | 200 全步/转 | |
| X向的正向运动的驱动力 | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| X向的负向运动的驱动力 | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| 相间电阻 | 3.3 Ω | 3.3 Ω | 3.3 Ω | 4.09 Ω | 4.09 Ω | 4.09 Ω | 1.7 Ω | 1.7 Ω | 1.7 Ω | 1.7 Ω | 1.7 Ω | typ. |
| 相间电感 | 2.8 mH | 2.8 mH | 2.8 mH | 0.18 mH | 0.18 mH | 0.18 mH | 3 mH | 3 mH | 3 mH | 3 mH | 3 mH | |
| 相间反电动势,旋转 | — | — | — | 1.68 V/kRPM | 1.68 V/kRPM | 1.68 V/kRPM | — | — | — | — | — | max. |
| 机械性能 | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | 公差 |
| Y向的允许推力 | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | max. |
| Z向的允许推力 | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| θX向的允许力矩 | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | max. |
| θY向的允许力矩 | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | max. |
| θZ向的允许力矩 | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | max. |
| X向的保持力,被动 | 50 N | 50 N | 50 N | — | — | — | 50 N | 50 N | 50 N | 30 N | 30 N | |
| X向的移动质量,空载 | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | |
| 传动螺杆类型 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | |
| 丝杠螺距 | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | |
| 齿轮速比i | — | — | — | 2401 : 81 | 2401 : 81 | 2401 : 81 | — | — | — | — | — | |
| 导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | 交叉滚柱导轨 | |
| 总质量 | 1400 g | 1500 g | 1700 g | 1100 g | 1200 g | 1500 g | 1000 g | 1100 g | 1600 g | 1400 g | 1600 g | |
| 材料 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | |
| 其他 | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | 公差 |
| 工作温度范围 | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | 5至40 °C | |
| 真空等级 | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁹ ǀ hPa | 10⁻⁹ ǀ hPa | |
| 最高耐温 | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 150 °C | 150 °C | |
| 接头 | HD D-sub 26(公头) | HD D-sub 26(公头) | HD D-sub 26(公头) | HD D-sub 26(公头) | HD D-sub 26(公头) | HD D-sub 26(公头) | D-sub 15(母头) | D-sub 15(母头) | D-sub 15(母头) | D-sub 15(母头) | D-sub 15(母头) | |
| 电缆长度 | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | |
| 推荐控制器/驱动器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-863 C-885与C-863.20C885 C-884 G-901 G-910 ACS模块化控制器 | C-863 C-885与C-863.20C885 C-884 G-901 G-910 ACS模块化控制器 | C-863 C-885与C-863.20C885 C-884 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 | C-663.12 C-885与C-663.12C885 G-901 G-910 ACS模块化控制器 |
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
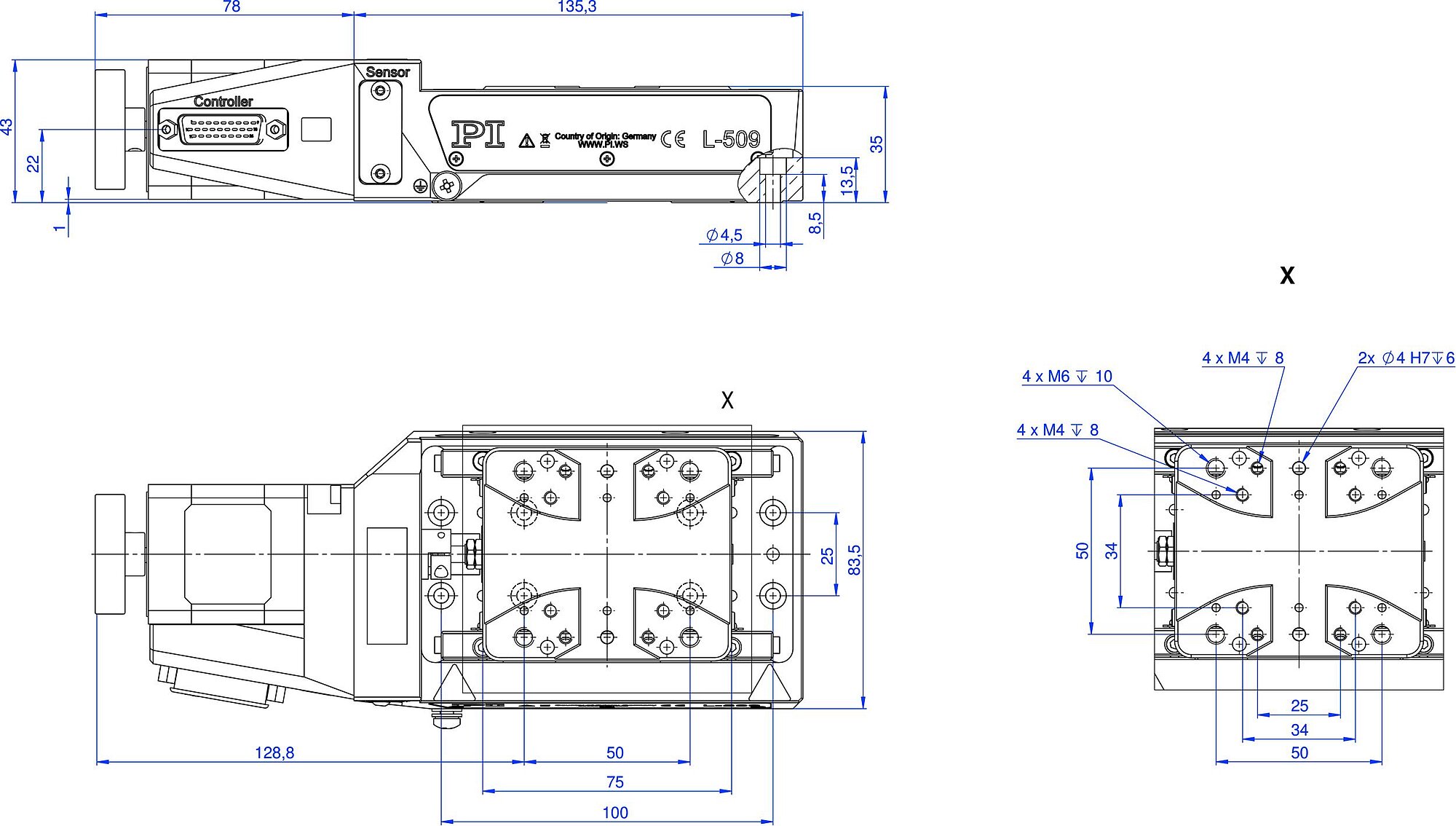
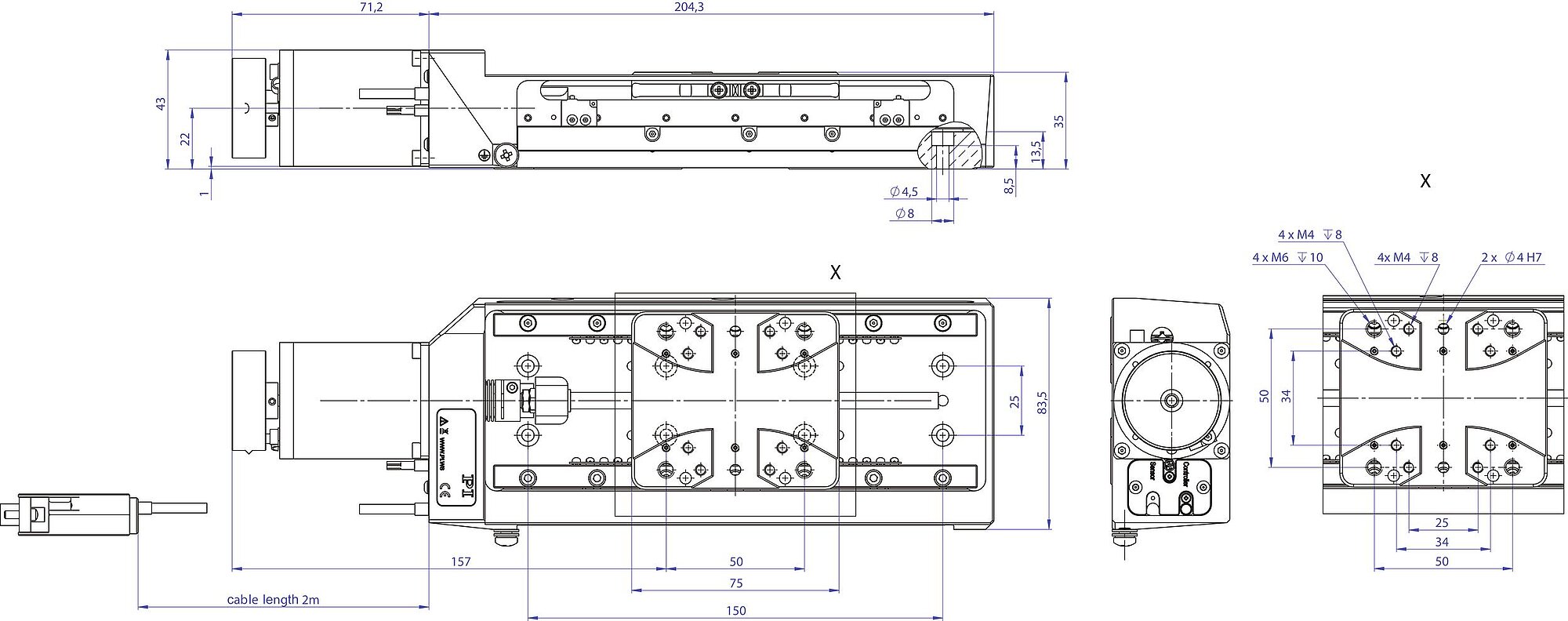
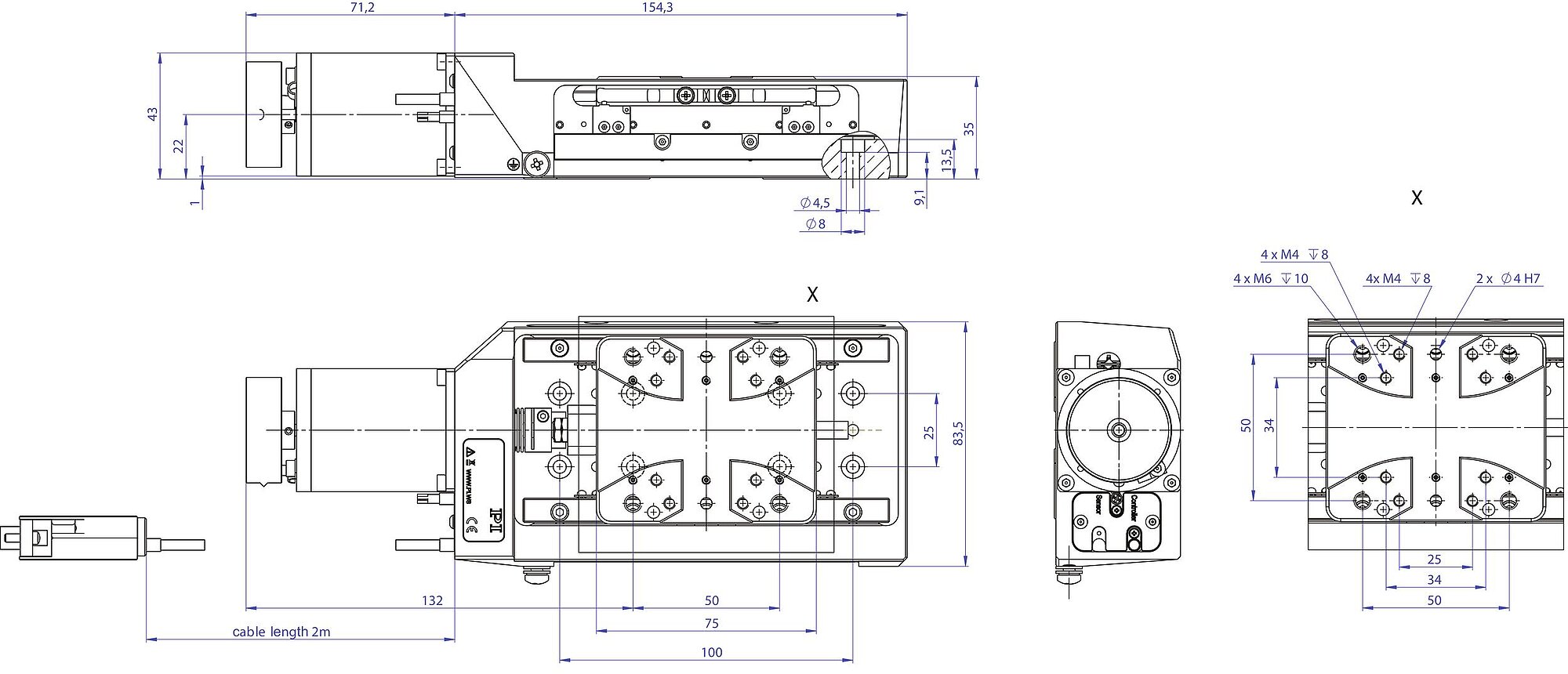
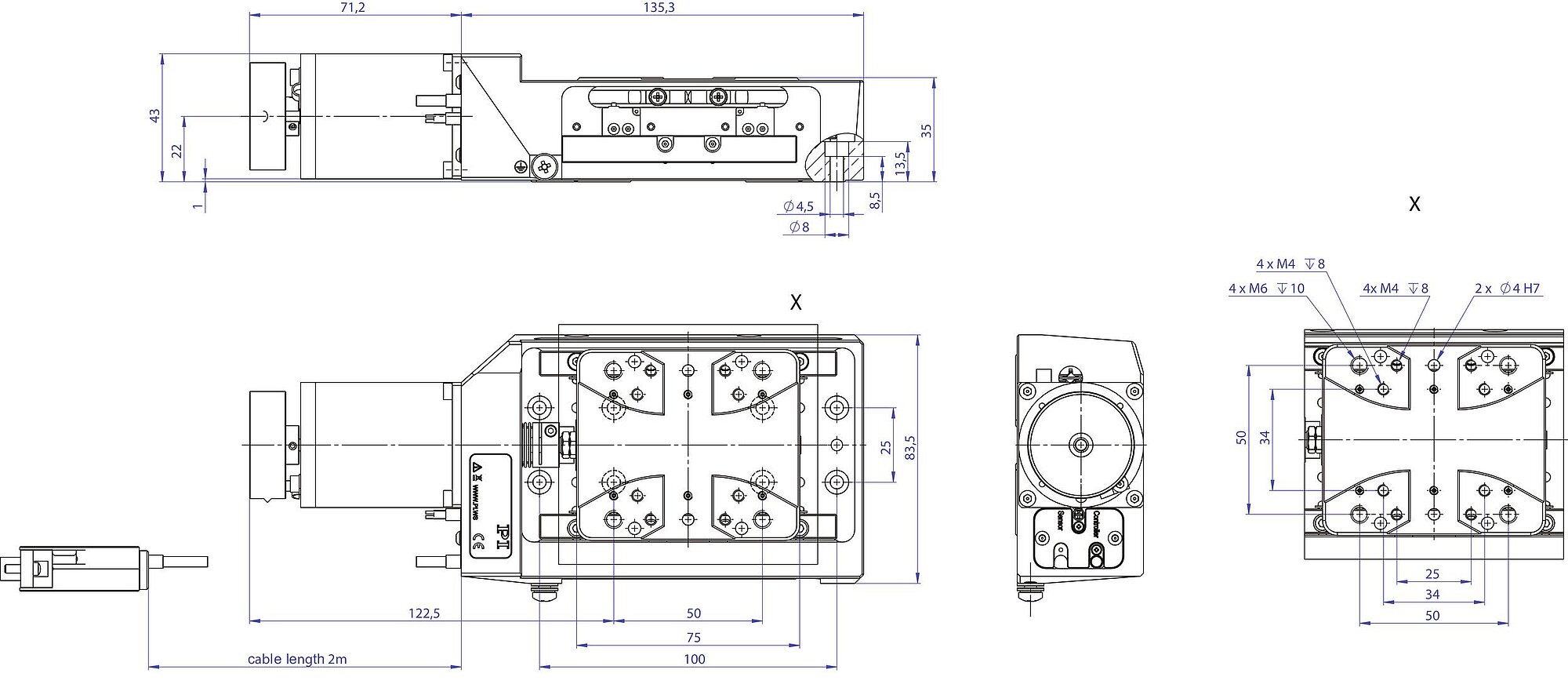
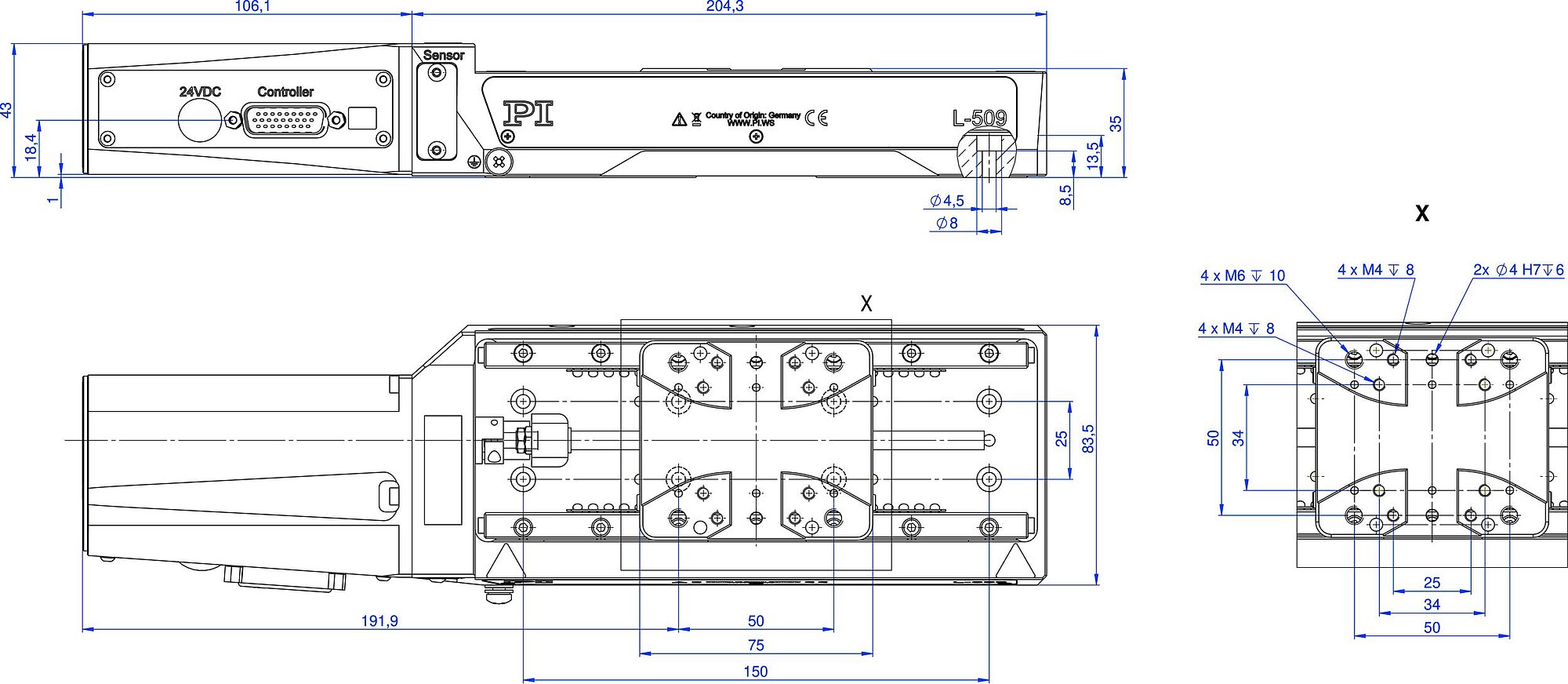
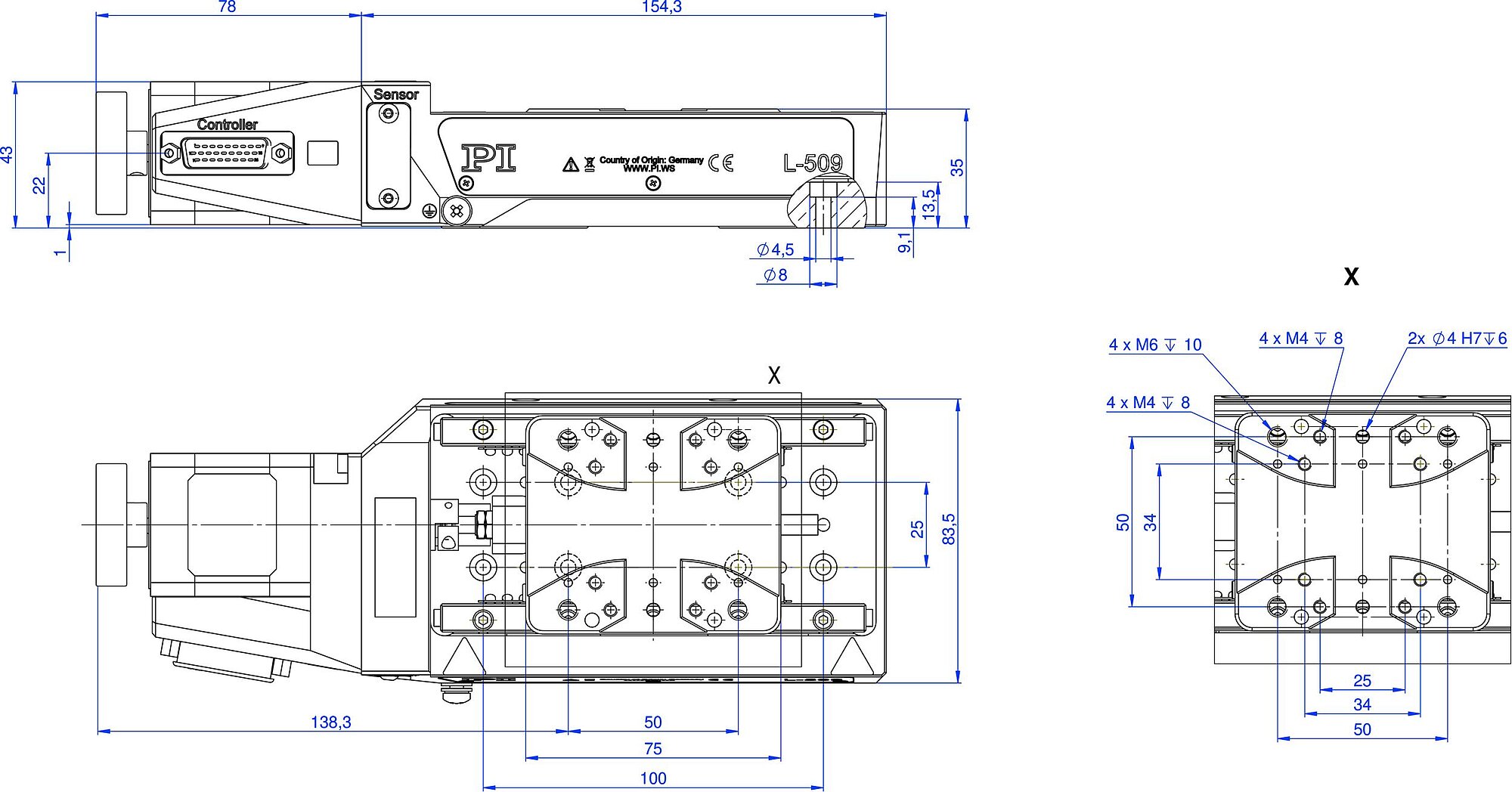
L-509真空兼容型精密线性平台(1 E-7 hPa)
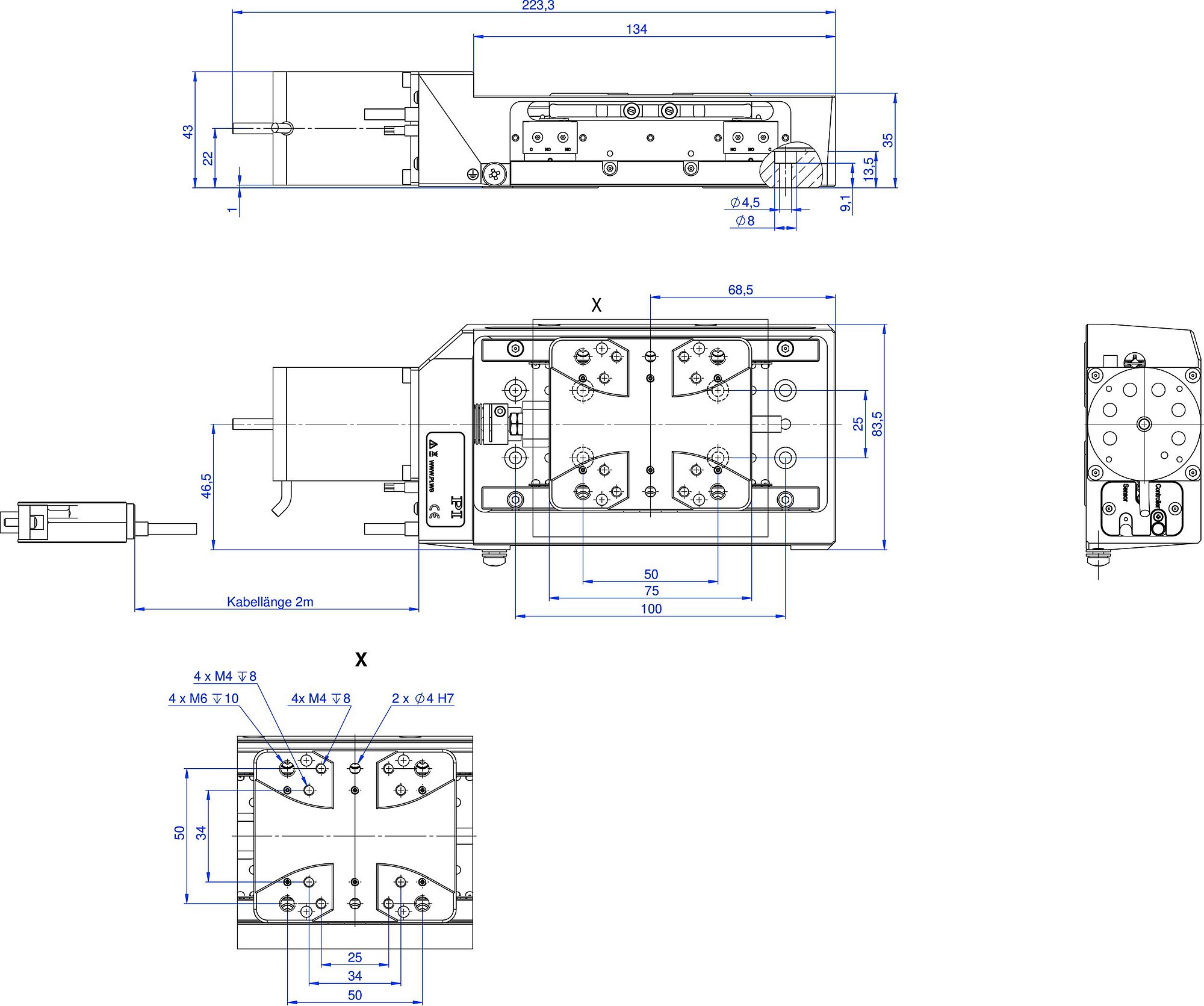
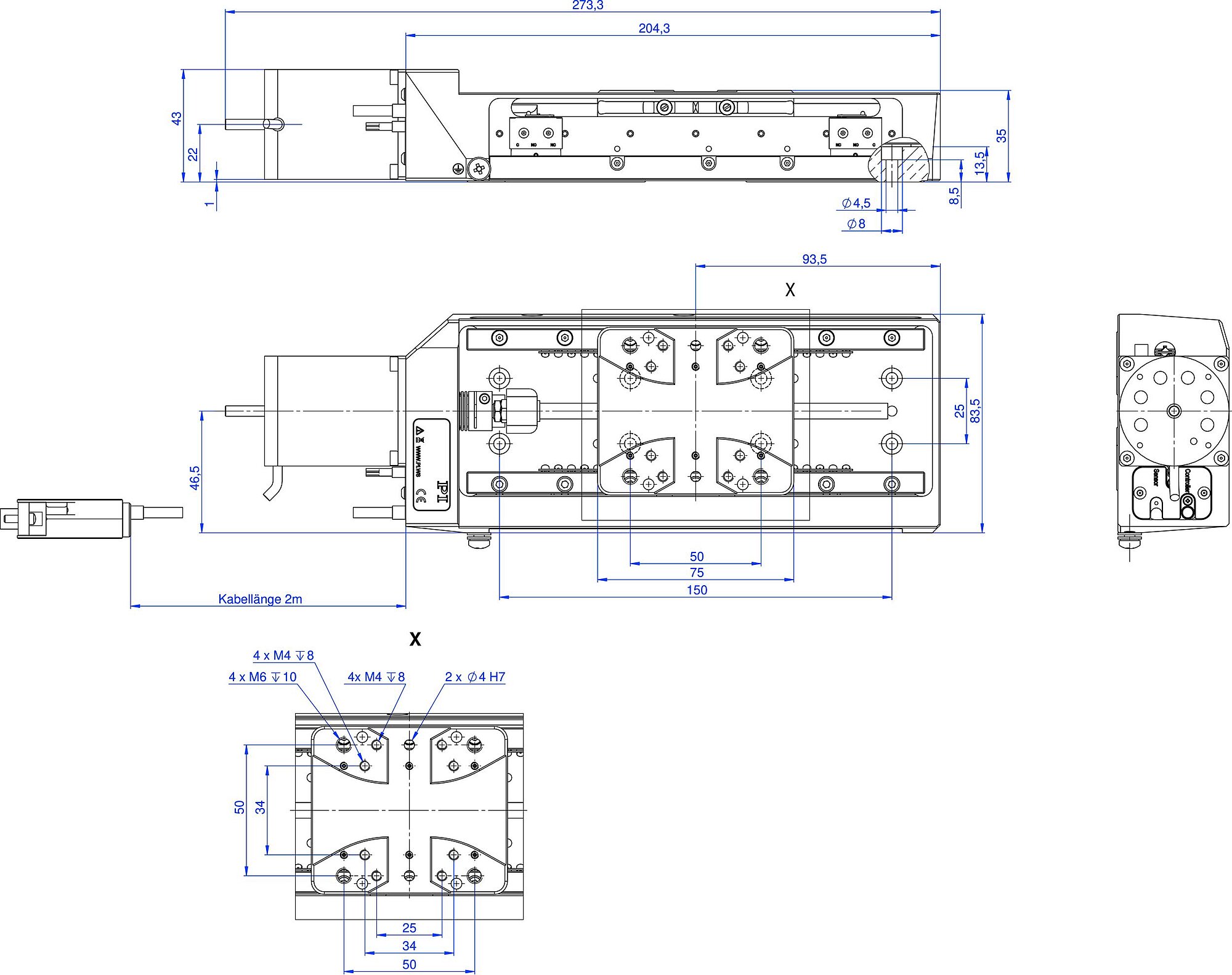
L-509真空兼容型精密线性平台(1 E-9 hPa)
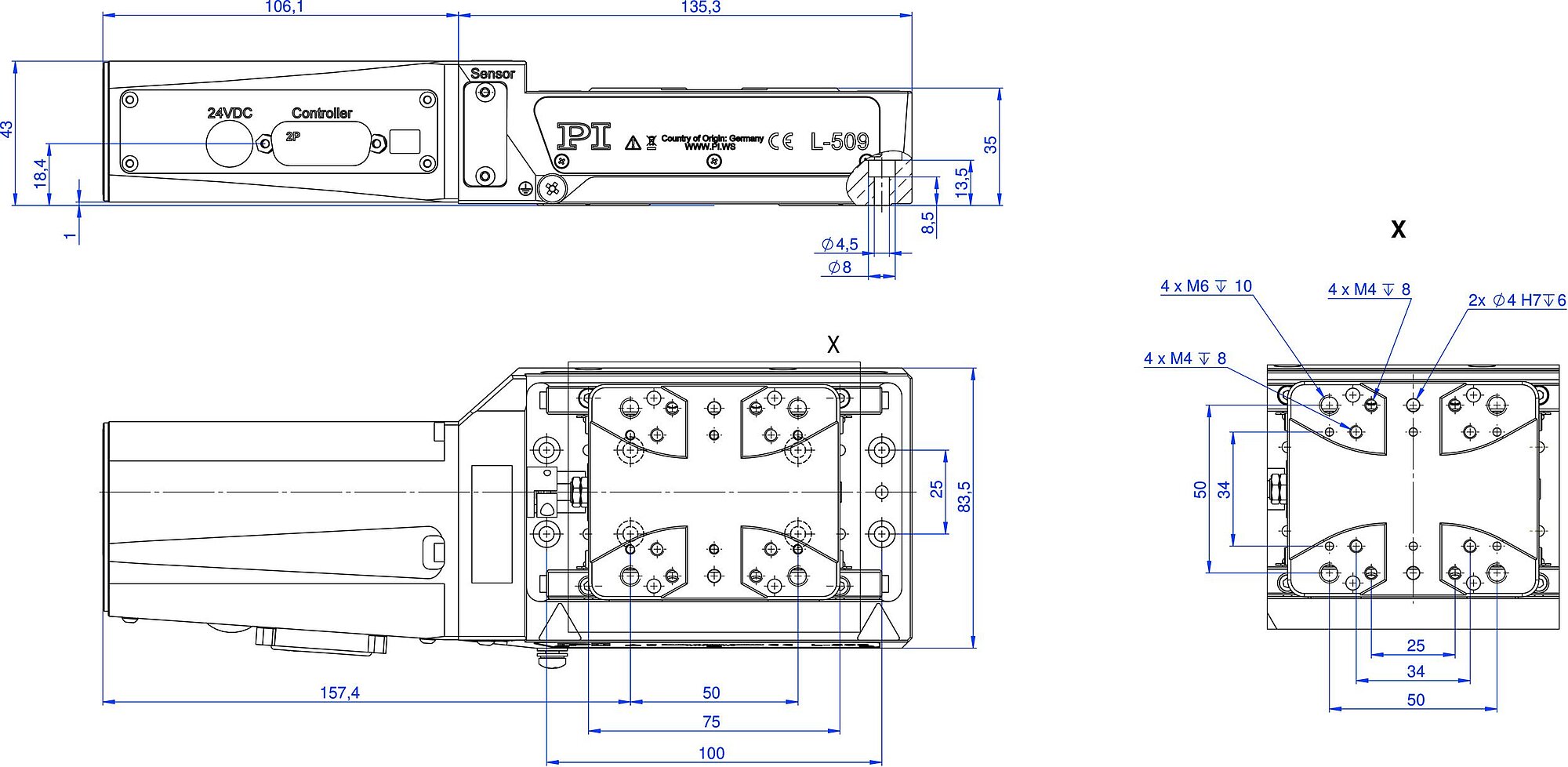
L-509真空兼容型精密线性平台(1 E-6 hPa)
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
真空兼容型精密线性平台;两相步进电机;行程为26mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;两相步进电机;行程为52mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;两相步进电机;行程为102mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;直流齿轮电机;行程为26mm;有效载荷为100N;最大速度为1.5mm/s;滚珠丝杠;增量旋转编码器,A/B正交,RS422;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;直流齿轮电机;行程为52mm;有效载荷为100N;最大速度为1.5mm/s;滚珠丝杠;增量旋转编码器,A/B正交,RS422;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;直流齿轮电机;行程为102mm;有效载荷为100N;最大速度为1.5mm/s;滚珠丝杠;增量旋转编码器,A/B正交,RS422;真空兼容至10⁻⁶hPa
真空兼容型精密线性平台;两相步进电机;行程为26mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁷hPa;2m电缆长度
真空兼容型精密线性平台;两相步进电机;行程为52mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁷hPa;2m电缆长度
真空兼容型精密线性平台;两相步进电机;行程为102mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁷hPa;2m电缆长度
真空兼容型精密线性平台;两相步进电机;行程为52mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁹hPa;2m电缆长度
真空兼容型精密线性平台;两相步进电机;行程为102mm;有效载荷为100N;最大速度为10mm/s;滚珠丝杠;真空兼容至10⁻⁹hPa;2m电缆长度