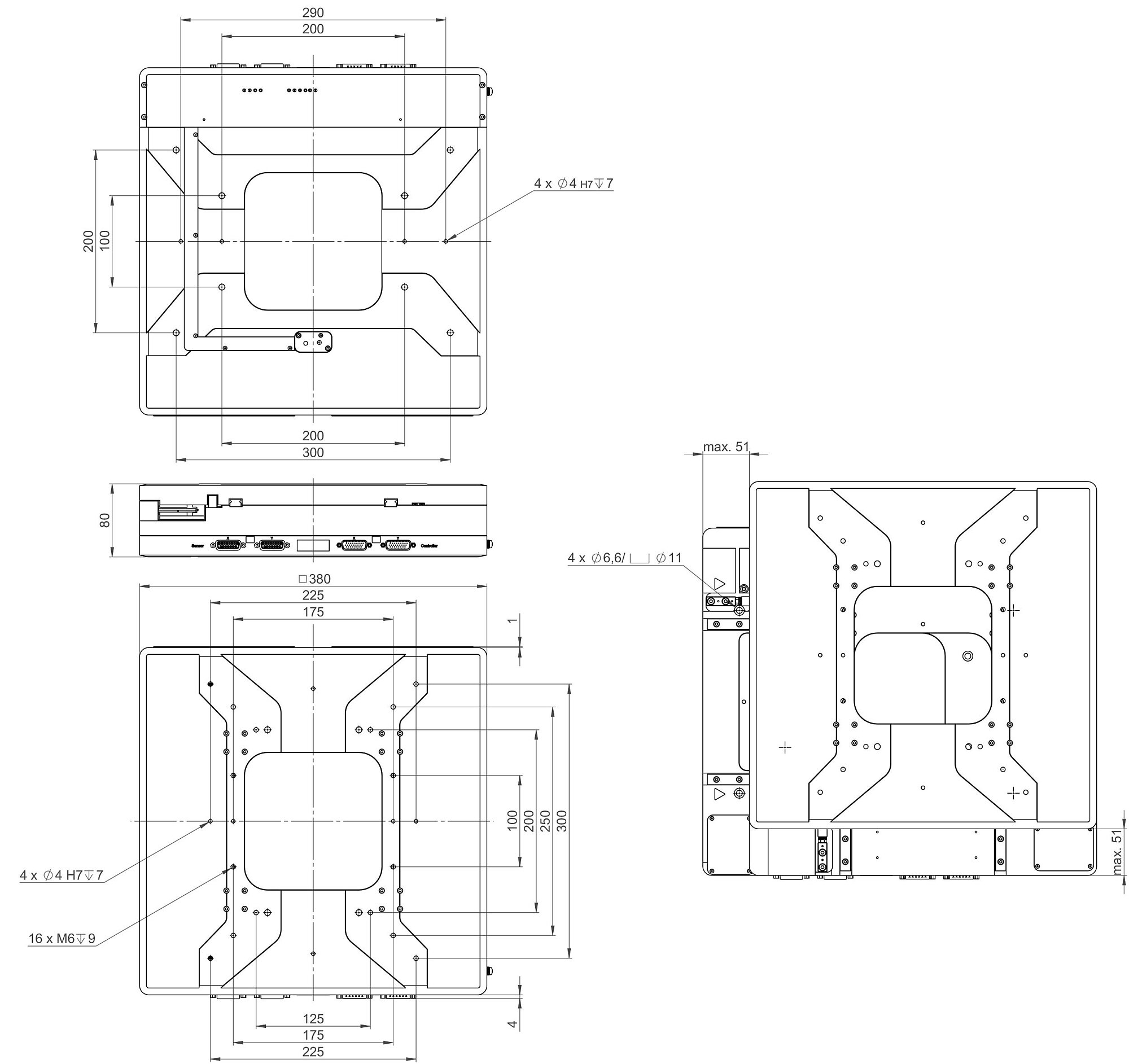
V-738.056111 PIMag精密XY位移平台,380毫米×380毫米宽度,102×102毫米行程,150×150毫米通光孔径,无铁芯三相线性电机, 48伏,增量带正弦/余弦信号传输的线性编码器,20微米传感器信号周期 ,含3米成套电缆 添加至报价单 从报价单移除